 +
+ +
+ +
+ -
-### Open Scratch 3.0
-
-open [CodeLab Scratch3](https://scratch-beta.codelab.club/)
+## 参考
+* [cozmo系列之入门 - 有性格且可编程的机器人](https://wwj718.github.io/post/%E5%B0%91%E5%84%BF%E7%BC%96%E7%A8%8B/cozmo-hello-world/)
-### Open extension_cozmo
+
\ No newline at end of file
diff --git a/docs/extension_guide/creating-coding.md b/docs/extension_guide/creating-coding.md
new file mode 100644
index 0000000..1969be8
--- /dev/null
+++ b/docs/extension_guide/creating-coding.md
@@ -0,0 +1,26 @@
+# 创意编程(creative-coding)
+> If I can't picture it, I can't understand it. -- Albert Einstein
+
+
+
+创意编程(creative-coding)社区将计算机视为一种表达媒介,这是我们关注该领域的原因。
+
+创意编程(creative-coding)社区有许多流行项目, 我们尤其关注以下几个:
+
+* [mosaic](https://mosaic.d3cod3.org/)
+ * [openFrameworks](https://openframeworks.cc/)
+* [openprocessing](https://www.openprocessing.org/)
+ * Processing
+ * [oscP5](http://www.sojamo.de/libraries/oscP5/)
+ * p5js
+ * [p5js-osc](https://github.com/genekogan/p5js-osc)
+* [Sonic Pi](/extension_guide/sonicPi/)
+* [ptsjs](https://ptsjs.org/)
+* [nannou](https://nannou.cc/)
+
+这些项目大多数都内置 OSC 支持。
+
+由于 Adapter 内置了 [OSC Server 和 Client](/extension_guide/osc/), 所以可以轻松与创意编程(creative-coding)生态的设施互操作!
+
+# 参考
+* [awesome-creative-coding](https://github.com/terkelg/awesome-creative-coding)
\ No newline at end of file
diff --git a/docs/extension_guide/digimon.md b/docs/extension_guide/digimon.md
new file mode 100644
index 0000000..0ca70c2
--- /dev/null
+++ b/docs/extension_guide/digimon.md
@@ -0,0 +1,12 @@
+# digimon
+
+插件介绍: [Neverland2.0原型之 兴趣的【指向】](https://www.codelab.club/blog/2020/12/08/digimon)
+
+
+插件源码: [node_digimon.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/nodes_v3/node_digimon.py).
+
+digimon 插件本质上是webserver(改编(remix)自[node_webserver_flask.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/nodes_v3/node_webserver_flask.py)),将 web 请求转化为 EIM message。
+
+
+# Scratch Demo
+[Scratch digimon demo](https://create.codelab.club/projects/8070/)
\ No newline at end of file
diff --git a/docs/extension_guide/eim.md b/docs/extension_guide/eim.md
index 8c2b370..6aa8f84 100644
--- a/docs/extension_guide/eim.md
+++ b/docs/extension_guide/eim.md
@@ -12,20 +12,13 @@
{!utils/open_scratch.md!}
-## 步骤 3:加载 EIM 插件
+## 步骤 3:打开 Scratch EIM 插件
-在 Web UI 中点击加载 EIM 插件:
+点击加载 Scratch EIM 插件。
-
-
-### Open Scratch 3.0
-
-open [CodeLab Scratch3](https://scratch-beta.codelab.club/)
+## 参考
+* [cozmo系列之入门 - 有性格且可编程的机器人](https://wwj718.github.io/post/%E5%B0%91%E5%84%BF%E7%BC%96%E7%A8%8B/cozmo-hello-world/)
-### Open extension_cozmo
+
\ No newline at end of file
diff --git a/docs/extension_guide/creating-coding.md b/docs/extension_guide/creating-coding.md
new file mode 100644
index 0000000..1969be8
--- /dev/null
+++ b/docs/extension_guide/creating-coding.md
@@ -0,0 +1,26 @@
+# 创意编程(creative-coding)
+> If I can't picture it, I can't understand it. -- Albert Einstein
+
+
+
+创意编程(creative-coding)社区将计算机视为一种表达媒介,这是我们关注该领域的原因。
+
+创意编程(creative-coding)社区有许多流行项目, 我们尤其关注以下几个:
+
+* [mosaic](https://mosaic.d3cod3.org/)
+ * [openFrameworks](https://openframeworks.cc/)
+* [openprocessing](https://www.openprocessing.org/)
+ * Processing
+ * [oscP5](http://www.sojamo.de/libraries/oscP5/)
+ * p5js
+ * [p5js-osc](https://github.com/genekogan/p5js-osc)
+* [Sonic Pi](/extension_guide/sonicPi/)
+* [ptsjs](https://ptsjs.org/)
+* [nannou](https://nannou.cc/)
+
+这些项目大多数都内置 OSC 支持。
+
+由于 Adapter 内置了 [OSC Server 和 Client](/extension_guide/osc/), 所以可以轻松与创意编程(creative-coding)生态的设施互操作!
+
+# 参考
+* [awesome-creative-coding](https://github.com/terkelg/awesome-creative-coding)
\ No newline at end of file
diff --git a/docs/extension_guide/digimon.md b/docs/extension_guide/digimon.md
new file mode 100644
index 0000000..0ca70c2
--- /dev/null
+++ b/docs/extension_guide/digimon.md
@@ -0,0 +1,12 @@
+# digimon
+
+插件介绍: [Neverland2.0原型之 兴趣的【指向】](https://www.codelab.club/blog/2020/12/08/digimon)
+
+
+插件源码: [node_digimon.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/nodes_v3/node_digimon.py).
+
+digimon 插件本质上是webserver(改编(remix)自[node_webserver_flask.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/nodes_v3/node_webserver_flask.py)),将 web 请求转化为 EIM message。
+
+
+# Scratch Demo
+[Scratch digimon demo](https://create.codelab.club/projects/8070/)
\ No newline at end of file
diff --git a/docs/extension_guide/eim.md b/docs/extension_guide/eim.md
index 8c2b370..6aa8f84 100644
--- a/docs/extension_guide/eim.md
+++ b/docs/extension_guide/eim.md
@@ -12,20 +12,13 @@
{!utils/open_scratch.md!}
-## 步骤 3:加载 EIM 插件
+## 步骤 3:打开 Scratch EIM 插件
-在 Web UI 中点击加载 EIM 插件:
+点击加载 Scratch EIM 插件。
- +
-eim 每秒钟更新一次数值,将数值报告给 Scratch3。
+# 积木介绍
+终点介绍以下几个积木:
-## 步骤 4:hello world
-
-选择对应的 Scratch3 插件:EIM
-
-
+
-eim 每秒钟更新一次数值,将数值报告给 Scratch3。
+# 积木介绍
+终点介绍以下几个积木:
-## 步骤 4:hello world
-
-选择对应的 Scratch3 插件:EIM
-
- -
-我们可以让 Scratch3 的角色读出 EIM 每秒更新一次的数值:
-
-
-
-我们可以让 Scratch3 的角色读出 EIM 每秒更新一次的数值:
-
- +
\ No newline at end of file
diff --git a/docs/extension_guide/eim_monitor.md b/docs/extension_guide/eim_monitor.md
index edca207..0cf344f 100644
--- a/docs/extension_guide/eim_monitor.md
+++ b/docs/extension_guide/eim_monitor.md
@@ -67,4 +67,4 @@ def monitor(content,logger):
## 参考
-- [使用 Python 拓展 Scratch 的能力](https://blog.just4fun.site/scratch-adapter-eim-script.html)
+- [使用 Python 拓展 Scratch 的能力](https://wwj718.github.io/scratch-adapter-eim-script.html)
diff --git a/docs/extension_guide/eim_trigger.md b/docs/extension_guide/eim_trigger.md
index adc8e5b..2cf5124 100644
--- a/docs/extension_guide/eim_trigger.md
+++ b/docs/extension_guide/eim_trigger.md
@@ -33,13 +33,11 @@ def trigger():
## 步骤 3:加载 extension_eim_trigger 插件
-在 Web UI 中点击加载 **extension_eim_trigger** 插件:
+在 Web UI 中点击加载 **extension_eim_trigger** 插件
-
+
\ No newline at end of file
diff --git a/docs/extension_guide/eim_monitor.md b/docs/extension_guide/eim_monitor.md
index edca207..0cf344f 100644
--- a/docs/extension_guide/eim_monitor.md
+++ b/docs/extension_guide/eim_monitor.md
@@ -67,4 +67,4 @@ def monitor(content,logger):
## 参考
-- [使用 Python 拓展 Scratch 的能力](https://blog.just4fun.site/scratch-adapter-eim-script.html)
+- [使用 Python 拓展 Scratch 的能力](https://wwj718.github.io/scratch-adapter-eim-script.html)
diff --git a/docs/extension_guide/eim_trigger.md b/docs/extension_guide/eim_trigger.md
index adc8e5b..2cf5124 100644
--- a/docs/extension_guide/eim_trigger.md
+++ b/docs/extension_guide/eim_trigger.md
@@ -33,13 +33,11 @@ def trigger():
## 步骤 3:加载 extension_eim_trigger 插件
-在 Web UI 中点击加载 **extension_eim_trigger** 插件:
+在 Web UI 中点击加载 **extension_eim_trigger** 插件
- -
-开启 **extension_eim_trigger** 插件后,
## 步骤 4:hello world
+开启 **extension_eim_trigger** 插件后
选择对应的 Scratch3 插件:EIM
@@ -80,4 +78,4 @@ def trigger():
## 参考
-- [使用 Python 拓展 Scratch 的能力](https://blog.just4fun.site/scratch-adapter-eim-script.html)
+- [使用 Python 拓展 Scratch 的能力](https://wwj718.github.io/scratch-adapter-eim-script.html)
diff --git a/docs/extension_guide/etoys.md b/docs/extension_guide/etoys.md
new file mode 100644
index 0000000..bf7c54f
--- /dev/null
+++ b/docs/extension_guide/etoys.md
@@ -0,0 +1,93 @@
+# Etoys
+
+## 介绍
+
+
+
+[Etoys](http://www.squeakland.org/) 是:
+
+- 一种教育工具,向孩子们传授强大的思想(powerful ideas)
+- 丰富的媒体创作环境和可视化编程系统
+- 开放系统,几乎适用于所有个人电脑
+
+Etoys 的开发始于迪斯尼,由艾伦·凯(Alan Kay)主导,受 Seymour Papert 的 Logo 语言影响,支持建构主义学习。
+
+开发团队包括:Scott Wallace、Ted Kaehler、John Maloney 和 Dan Ingalls。
+
+极大影响了 Scratch(John Maloney 是 Scratch 的首席架构师)
+
+## 截图
+
+
+
+
+
+## 接入 Adapter
+
+Etoys 的最后一次更新是 2012 年(5.0 版本)。
+
+我们试图通过将其接入 Adatper,使其得到 Adapter 连接的整个生态:物联网、AI、开源硬件... 使 Etoys 强大的表达能力与新的技术融合。
+
+### 思路
+接入的思路是"hack"。
+
+Etoys与外部通信的方式并不多,在 **百宝箱** 里,仅发现了Scratch客户端,可以与外部通信。
+
+
+
+于是我们通过将 Adapter 伪装成 Scratch 1.3,来与Etoys通信,消息流向是(`Etoys->Adatper->Scratch3.0`)
+
+由于百宝箱里的 Scratch客户端是socket client,所以更复杂的通信也是可能的,但`Etoys->Adatper->Scratch3.0`是我自己的典型使用场景。 更多细节参考: [Etoys 学习笔记: 与 Scratch 互操作](https://wwj718.github.io/post/%E5%B0%91%E5%84%BF%E7%BC%96%E7%A8%8B/etoys-learning-note/).
+
+也欢迎你自己进行hack :)
+
+### 使用
+使用方式很简单,在Adapter 中开启 `extension_socket_server` 插件(如果不存在该插件,到[插件市场](/extension_guide/extension_market/)下载即可),源码在[extension_socket_server.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_socket_server.py)
+
+开启插件后,加载demo程序,并点击绿旗运行它。
+
+[Scratch-Etoys](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/Scratch-etoys.sb3)
+
+之后在 Etoys 里使用 broadcask 积木 即可:
+
+
+
+!!! 提醒
+ 在使用具体积木时,需要先建立连接,点击 Etoys里Scratch客户端即可,如果连接顺利,猫的眼睛会睁开。
+
+以下是一个简单的例子:
+
+
+
+使用Etoys里的按钮打开本地目录和CodeLab主页,背后利用到了 Adapter Python Extension的能力:
+
+
+
+一切都是消息!
+
+## Etoys 与 Scratch 对比
+Scratch适合入门,它通过给定清晰的结构,提供更多确定性,让入门变得容易(不必担心搞乱环境)。
+
+随着项目变得更复杂,Etoys是更理想的选择,因其拥有继承自Smalltalk的强大环境和表达能力,惊人的一致性,彻底的面向对象,随着项目逐渐生长,复杂度总是在可控的范围内(因为消息-对象隐喻)。
+
+随着项目变得复杂,Scratch用户需要掌握越来越多的“技巧”,编程成为一件搜罗和记忆许多技巧(特例)的乏味工作(就像传统计算机教育),环境无法提供更多的支持。
+
+Etoys/Squeak 为“Scratch下一步是什么?”提供了理想的答案: `Scratch -> Etoys -> Squeak(Smalltalk)`
+
+## 教育者
+Alan Kay 和 Etoys社区围绕Etoys写了许多精彩的文章,推荐阅读。也许是有史以来关于向孩子传授 powerful ideas 最精彩的文章之一。
+
+诸如:
+
+* [Squeak Etoys Authoring & Media](http://www.squeakland.org/content/articles/attach/etoys_n_authoring.pdf)
+* [Kedama: A GUI-based Interactive Massively Parallel Particle Programming System](http://www.vpri.org/pdf/tr2005001_ohshima_kedama.pdf)
+
+更多文章可以从[Etoy resources](http://www.squeakland.org/resources/articles/) 和 [Viewpoints Research Institute](http://www.vpri.org/)里找
+
+
+## 进阶
+你可以参考[Etoys 学习笔记: 与 Scratch 互操作](https://wwj718.github.io/post/%E5%B0%91%E5%84%BF%E7%BC%96%E7%A8%8B/etoys-learning-note/)自行构建功能更丰富的Server,使用 [Adapter Node](/dev_guide/Adapter-Node/) 将其接入Adapter生态。
+
+## 参考
+
+- [Etoys 学习笔记: 与 Scratch 互操作](https://wwj718.github.io/post/%E5%B0%91%E5%84%BF%E7%BC%96%E7%A8%8B/etoys-learning-note/)
diff --git a/docs/extension_guide/extension_market.md b/docs/extension_guide/extension_market.md
index d940a94..b3901c5 100644
--- a/docs/extension_guide/extension_market.md
+++ b/docs/extension_guide/extension_market.md
@@ -2,11 +2,15 @@
CodeLab Adapter 3.0 有一个统一的插件市场,可以方便下载到新的插件,就像我们在 vscode 或 sublime text 里的体验的那种插件系统,有个体面的 UI,而不是使用 curl 或者 wget 去 github 里手动下载。
-
+
+
+
+
+
作为演示我们下载了插件市场里的一个番茄工作法插件,这个插件的功能很简单(源码也是公开的): 每 25 分钟提醒编程者起来看看窗外风景。
-
+
下载完成之后,不需要重启软件,即可在 Scratch 和 Web UI 中看到新下载的插件,点击运行它:每 25 分钟,你就会收到一条信息提示你做个短途休息。
diff --git a/docs/extension_guide/extension_python_kernel.md b/docs/extension_guide/extension_python_kernel.md
index c7bfe9c..17745b0 100644
--- a/docs/extension_guide/extension_python_kernel.md
+++ b/docs/extension_guide/extension_python_kernel.md
@@ -1,20 +1,13 @@
-# Python eval kernel
+# Python
-## 依赖
+## 介绍
+
-{!utils/dependence.md!}
+此扩展可以将 Python 代码交给 Adapter 执行(eval),并获取结果。
-## 步骤 1:打开 Codelab Adapter
+## hello world
-{!utils/open_adapter.md!}
-
-## 步骤 2:打开 Codelab Scratch3
-
-{!utils/open_scratch.md!}
-
-## 步骤 3:hello world
-
-选择对应的 Scratch3 插件:Python 插件
+打开 Scratch Python 插件

@@ -26,7 +19,14 @@

-Python 插件将以 [eval](https://docs.python.org/zh-cn/3.7/library/functions.html#eval) 执行 Python 代码(只能执行表达式),如果你想使用 exec ,文末有指导。
+## 积木说明
+暂无
+
+## 进阶
+
+### 使用技巧
+
+#### 自定义积木
你可以在插件中添加新的类,来自定义新功能, 我们做了一个范例: [PyHelper 源码](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_python.py#L18)。你可以使用 `PyHelper.open_url("https://www.codelab.club/")`来为 Scratch 引入打开网页的功能。
@@ -48,11 +48,47 @@ Python 插件将以 [eval](https://docs.python.org/zh-cn/3.7/library/functions.h
你可以在插件里添加更多的类似`PyHelper`的自定义类,来为 Scratch 引入更多新的能力,使用 Python 就行!
-## 延伸
+#### 与网络交互(requests)
+
+考虑到网络极为强大,Python 插件允许用户在 Scratch 中直接与 requests 交互(只支持表达式,形如`requests.get(...), requests.post(...)`)。
+
+由于 requests 的 API 极为漂亮(支持链式风格),你几乎可以单个表达式中干绝大多数的事情!
+
+[requests 文档](https://docs.python-requests.org/zh_CN/latest/)。
+
+一些典型的用例包括:
+
+* [两个 Adapter 之间的消息通信](https://adapter.codelab.club/user_guide/%E4%B8%8E%E5%A4%96%E9%83%A8%E7%B3%BB%E7%BB%9F%E9%80%9A%E4%BF%A1/#requests)
+* 触发 webhook
+* 请求[公开的网络 API](https://github.com/public-apis/public-apis)
+* 与自己搭建的 web server 交互
+
+##### demo
+```py
+requests.get("http://httpbin.org/get")
+# 链式写法
+requests.get("http://httpbin.org/get").text
+requests.get("http://httpbin.org/get").json()
+
+# 携带参数
+requests.get("http://httpbin.org/get", params={"name": "codelab"})
+
+# post
+requests.post('http://httpbin.org/post', data = {'key':'value'})
+```
+
+##### 一些奇怪的想法
+* 通过与带有存储能力的 API 结合,可以构建出类似云变量这种东西
+ * 或者使用 [json-server](https://github.com/typicode/json-server) 临时搭建一个
+
+### 项目链接
+
+
+#### 文件储存案例
再来做一个例子,[@HansonXie](http://www.concentric-circle.com/author/admin/) 给我写了封邮件,说想写一个extension或者node来进行文件存储,希望用Python来做,而不是Javascript。在此我写个简单例子
-我们可以使用 [Jupyterlab](https://adapter.codelab.club/extension_guide/jupyterlab/) 编辑[extension_python.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_python.py). 在其中增加一个新的助手类,来负责存储文件
+我们可以使用 [Jupyterlab](/extension_guide/jupyterlab/) 编辑[extension_python.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_python.py). 在其中增加一个新的助手类,来负责存储文件
```python
class StorageHelp:
@@ -86,7 +122,12 @@ eval(code, {"__builtins__": None}, {

-# 最后
+## FAQ
+### 如何工作
+
+!!! 提醒
+ exec 可能带来各种安全风险,此外,eval也更符合我们采用的`对象/消息`隐喻。
+ 如果你确实需要exec,可以自行构建插件, 参考[python_exec.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/python_exec.py)
内置在 Adapter 里的 Python 插件以 [eval](https://docs.python.org/zh-cn/3.7/library/functions.html#eval) 执行 Python 代码(只能执行表达式),如果你希望以功能更轻大的 [exec](https://docs.python.org/zh-cn/3.7/library/functions.html#exec) (可执行任何 Python 语句)执行 Python 代码,可以在[插件市场](/extension_guide/extension_market/)里下载 [extension_python_exec 插件](/extension_guide/python_exec/)。
@@ -98,11 +139,11 @@ eval(code, {"__builtins__": None}, {
我们之没有将 extension_python_exec 内置在 Adapter 中,而是希望用户在需要时自行下载,因为它的功能过于强大,可能会带来一下风险,所以选择权交由使用者。强大的能力通常会伴随风险,当然我们不会做太多限制,由你决定:)
-# 参考
+## 参考
-- [将 codelab-adapter 用作 Python 解释器](https://blog.just4fun.site/scratch3-adapter-as-python-interpreter.html)
+- [将 codelab-adapter 用作 Python 解释器](https://wwj718.github.io/scratch3-adapter-as-python-interpreter.html)
diff --git a/docs/extension_guide/ha.md b/docs/extension_guide/ha.md
index 6e3970e..7bf3208 100644
--- a/docs/extension_guide/ha.md
+++ b/docs/extension_guide/ha.md
@@ -1,4 +1,4 @@
# Tutorial
hello world
-参考[安装和配置 Home Assistant](https://adapter.codelab.club/Neverland/HA/)
\ No newline at end of file
+参考[安装和配置 Home Assistant](/Neverland/HA/)
\ No newline at end of file
diff --git a/docs/extension_guide/halocode.md b/docs/extension_guide/halocode.md
new file mode 100644
index 0000000..3b42788
--- /dev/null
+++ b/docs/extension_guide/halocode.md
@@ -0,0 +1,4 @@
+# 光环板
+
+
+光环板[支持mqtt](https://makeblock-micropython-api.readthedocs.io/zh/latest/public_library/Third-party-libraries/mqtt.html), 可通过[mqtt协议接入](https://adapter.codelab.club/extension_guide/iot/)
\ No newline at end of file
diff --git a/docs/extension_guide/imageData.md b/docs/extension_guide/imageData.md
index 28262f1..a0f2f9b 100644
--- a/docs/extension_guide/imageData.md
+++ b/docs/extension_guide/imageData.md
@@ -1,2 +1,24 @@
# Tutorial
-hello world
\ No newline at end of file
+用于获取和设置舞台区数据,具体而言:
+
+* 获取当前舞台图像、当前视频图像
+ * 这些数据的消费者包括:
+ * [extension_stage.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_stage.py)
+ * [node_physical_blocks2.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/nodes_v3/node_physical_blocks2.py)
+* 获取/设置当前角色的自定义造型
+
+# demo
+大多数的 physical blocks 项目都使用到了`获取当前视频图像`.
+
+而以下项目使用到了`获取/设置当前角色的自定义造型`:
+
+
+
+
+
+## 与 physical blocks 2.0 配合使用
+
+
+
+!!! 提醒
+ 如果你想切换分辨率,Adapter的版本需要`>=3.7.4`, 或者到插件市场下载最新的physical blocks 2.0插件。 此外值得注意的是,分辨率越高,刷新率越慢(很大原因是因为传输的数据大造成的)
\ No newline at end of file
diff --git a/docs/extension_guide/intelino.md b/docs/extension_guide/intelino.md
new file mode 100644
index 0000000..c429005
--- /dev/null
+++ b/docs/extension_guide/intelino.md
@@ -0,0 +1,23 @@
+# intelino
+
+入门用户推荐使用最新的 [mu-editor](https://codewith.mu/en/download) 编辑器
+
+如果你使用其他 Python 环境,请确保`Python >= 3.8`
+
+## windows
+
+需要 windows10 或 windows11
+
+windows10: `pip install intelino-trainlib bleak==0.12.1`
+
+windows11: `pip install intelino-trainlib`
+
+## macOS & Linux
+
+`pip install intelino-trainlib`
+
+## 相关资料
+
+- 源码: [intelino-trainlib-py](https://github.com/intelino-code/intelino-trainlib-py)
+ - 案例: [examples](https://github.com/intelino-code/intelino-trainlib-py/tree/master/examples)
+- 文档: [readthedocs](https://intelino-trainlib-async-py.readthedocs.io/en/latest/index.html)
diff --git a/docs/extension_guide/iot.md b/docs/extension_guide/iot.md
index 28262f1..6c97955 100644
--- a/docs/extension_guide/iot.md
+++ b/docs/extension_guide/iot.md
@@ -1,2 +1,60 @@
-# Tutorial
-hello world
\ No newline at end of file
+# MQTT 插件
+MQTT broker 需要支持 wss(websockets) 协议, 才能在Scratch里连接它
+
+CodeLab合作伙伴[英荔教育](https://aimaker.space/about)为CodeLab社区用户提供一个免费 MQTT broker:
+
+
+* url: mqtt.longan.link
+* 默认用户名/密码: guest/test
+* tcp port: 1883
+* tls port 8883
+* websockets port: 8084
+
+# Demo
+## scratch client
+[scratch demo](https://create.codelab.club/projects/22163/editor/)
+
+## python client
+基于 [paho-mqtt](https://github.com/eclipse/paho.mqtt.python)
+
+```py
+import paho.mqtt.client as mqtt
+
+# The callback for when the client receives a CONNACK response from the server.
+def on_connect(client, userdata, flags, rc):
+ # print("Connected with result code "+str(rc))
+ if rc == 0:
+ print('已连接')
+ else:
+ print('连接出错!')
+ # Subscribing in on_connect() means that if we lose the connection and
+ # reconnect then subscriptions will be renewed.
+ client.subscribe("test")
+
+# The callback for when a PUBLISH message is received from the server.
+def on_message(client, userdata, msg):
+ print(msg.topic+" "+str(msg.payload))
+
+client = mqtt.Client()
+client.on_connect = on_connect
+client.on_message = on_message
+client.username_pw_set('guest', 'test')
+
+client.connect("mqtt.longan.link", 1883, 60)
+
+# Blocking call that processes network traffic, dispatches callbacks and
+# handles reconnecting.
+# Other loop*() functions are available that give a threaded interface and a
+# manual interface.
+client.loop_forever() # client.loop_start() 是非阻塞的
+```
+
+## MicroBlocks demo
+[MicroBlocks demo](https://microblocks.codelab.club/#scripts=GP%20Scripts%0Adepends%20%27MQTT%27%20%27WiFi%27%0A%0Ascript%20429%20-138%20%7B%0AwhenStarted%0Acomment%20%271.%20connect%20wifi%27%0A%27wifi%20connect%20to%27%20%27Elite_1006%27%20%2720130530%27%203%0AwaitMillis%201000%0Acomment%20%272.%20connect%20MQTT%20broker%27%0A%27MQTT%20connect%20to%27%20%27mqtt.longan.link%27%20128%20%27MicroBlocks_client%27%20%27guest%27%20%27test%27%0Acomment%20%27subscribe%20topic%27%0A%27MQTT%20sub%27%20%27microblocks%27%0AsendBroadcast%20%27go%21%27%0A%7D%0A%0Ascript%20429%20155%20%7B%0AwhenBroadcastReceived%20%27go%21%27%0Acomment%20%27receive%20mqtt%20message%27%0Aforever%20%7B%0A%20%20if%20%28%27MQTT%20connected%27%29%20%7B%0A%20%20%20%20event%20%3D%20%28%27last%20MQTT%20event%27%29%0A%20%20%20%20if%20%28isType%20event%20%27list%27%29%20%7B%0A%20%20%20%20%20%20sayIt%20%27topic%27%20%28%27MQTT%20event%20topic%27%20event%29%20%27%2C%20payload%27%20%28%27MQTT%20event%20payload%27%20event%29%0A%20%20%20%20%7D%0A%20%20%7D%20else%20%7B%0A%20%20%20%20sayIt%20%27try%20to%20connect%20...%27%0A%20%20%20%20waitMillis%20500%0A%20%20%20%20%27MQTT%20connect%20to%27%20%27mqtt.longan.link%27%20128%20%27MicroBlocks_client%27%20%27guest%27%20%27test%27%0A%20%20%7D%0A%7D%0A%7D%0A%0Ascript%20581%20120%20%7B%0Acomment%20%27publish%20topic%20payload%27%0A%27MQTT%20pub%27%20%27scratch%27%20%27Hello%21%27%0A%7D%0A%0Ascript%20403%20-168%20%7B%0Acomment%20%27work%20with%20https%3A%2F%2Fcreate.codelab.club%2Fprojects%2F22163%2Feditor%2F%27%0A%7D%0A%0A)
+
+
+# 参考
+* [MQTT.js](https://github.com/mqttjs/MQTT.js): 提供 cli 工具
+* [mosquitto](https://github.com/eclipse/mosquitto)
+* [paho-mqtt](https://github.com/eclipse/paho.mqtt.python)
+* [gmqtt](https://github.com/wialon/gmqtt)
\ No newline at end of file
diff --git a/docs/extension_guide/jupyterlab.md b/docs/extension_guide/jupyterlab.md
index 14d0777..69dffbf 100644
--- a/docs/extension_guide/jupyterlab.md
+++ b/docs/extension_guide/jupyterlab.md
@@ -1,6 +1,8 @@
-# [JupyterLab](https://jupyterlab.readthedocs.io/en/stable/)
+# JupyterLab
+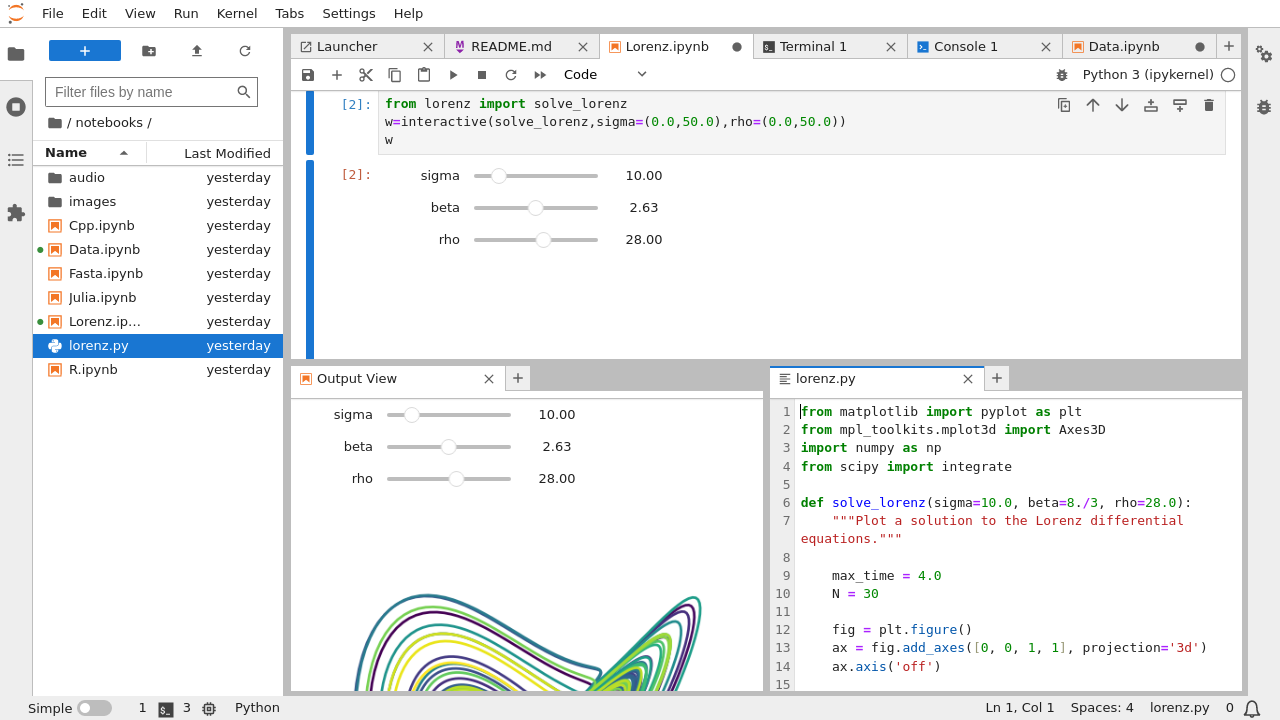
-JupyterLab 是 jupyter notebook 的下一代产品。
+## 介绍
+[JupyterLab](https://jupyterlab.readthedocs.io/en/stable/) 是 jupyter notebook 的下一代产品。
Jupyter Notebook(前身是IPython Notebook)是一个基于Web的交互式计算环境。
@@ -16,24 +18,13 @@ CodeLab Adapter 将其集成到插件,如果想编辑代码,诸如
或者任何时候你想学习 Python ,JupyterLab 都是你理想的伙伴。
-# Tutorial
-## 依赖
+## hello world
+在 webUI 里运行 **extention_jupyterlab** 插件。
-{!utils/dependence.md!}
+
-## 步骤 1:打开 Codelab Adapter
+---
-{!utils/open_adapter.md!}
-
-运行 **extention_jupyterlab** 插件。
-
-!!! 提醒
- 完整版已经内置了一切依赖。
- 如果你是有精简版,确保你已经[安装了 Python3](/Python_Projects/install_python/)。
- 你不必手动安装 **jupyterlab** ,运行插件,CodeLab Adapter 会为你其余的一切。
- 当然你也可以在命令行里手动安装它。
-
-## 步骤 2:使用 jupyterlab
jupyterlab 默认将打开 [Adapter主目录](/user_guide/FAQ/#adapter)。

@@ -48,3 +39,92 @@ jupyterlab 默认将打开 [Adapter主目录](/user_guide/FAQ/#adapter)。
6. Adapter 运行日志,当你需要[调试](/dev_guide/debug/) extension 时,查看日志将很有帮助。
你可以使用 jupyterlab 随意修改它们。别担心改坏了。如果发现修改后 Adapter无法正常运行。则将整个[ Adapter 主目录](/user_guide/FAQ/#adapter)删除即可,重启 Adapter,你将得到一个崭新的 Adapter 主目录。它是为你学习而构建的环境,别担心玩坏它,尽情探索吧。
+
+## 积木说明
+暂无
+
+## 项目链接
+暂无
+
+## FAQ
+
+### 启用 Jupyterlab 插件,没有自动打开 Jupyterlab
+可能是因为你的系统用户名(windows系统)是中文,目前 Jupyterlab 存在这个 bug, 官方正在修复中。
+
+我们目前给出了一个手动打开方案:
+
+1. 启动 Jupyterlab 插件
+2. 稍等 3-5秒, 之后在浏览器里打开`localhost:8888` (如果打不开,则试试`localhost:8889`)
+3. 复制 `Adapter token` 到 Jupyterlab 登陆框里
+
+
+
+
+
+### 安装第三方库
+```py
+import pip
+# 举个例子: 安装 furl
+pip.main(["install", "furl"])
+# 你也可以使用国内的源:
+# pip.main(['install', 'furl', '-i', 'https://mirrors.aliyun.com/pypi/simple'])
+# 针对ssl证书有问题的用户 pip.main(['install', 'furl', '-i', 'http://mirrors.aliyun.com/pypi/simple', "--trusted-host", "mirrors.aliyun.com"])
+```
+
+安装完之后,需要在 jupyterlab 重启kernel,也可以重启 jupyterlab。
+
+### 列出所有库
+```py
+import pip
+pip.main(["freeze"])
+```
+
+### 汉化
+`Adapter >= 3.3.1`,jupyterlab 版本升级到 3.0,支持切换语言:
+
+
+
+
+### 精简版(linux/RPI)如何安装 jupyterlab
+完整版已经内置了一切依赖。
+
+如果你是有精简版,确保你已经[安装了 Python3](/Python_Projects/install_python/)。
+
+你不必手动安装 **jupyterlab** ,运行插件,CodeLab Adapter 会为你其余的一切。
+
+当然你也可以在命令行里手动安装它。
+
+### 如何启动实时协作模式
+[实时协作模式](https://jupyterlab.readthedocs.io/en/stable/user/rtc.html)对于结对编程、远程教学以及课堂教学可能都有帮助。
+
+启动实施模式的方法是,使用 jupyterlab 打开 extensions 目录里的 `extension_jupyterlab.py` 插件,将 `self.allow_collaborative`改为True。 之后重启 Jupyterlab 插件。
+
+此时,同一个局域网里的任何电脑都可以进入同一个 Jupyterlab 里,进行实时协作。
+
+具体方法是:
+
+1. 在其他电脑上的浏览器里(可以是移动设备!),打开启用实时协作的Jupyterlab的地址入口(形如`192.168.31.100:8888`), 之后输入token,token与Adapter token一样。
+2. 结对编程者打开同一个notebook文件(或者 `.py` 文件)。
+
+### 运行 Python 脚本
+
+在 Jupyterlab 中打开 **终端**.
+
+MacOS:
+
+`./Support/bin/python3 ./adapter_home/notebooks/hello.py`
+
+Windows:
+
+`.\src\python\python .\src\adapter_home\notebooks\hello.py`
+
+### 为何 MacOS 下无法在jupyterlab使用摄像头(如在opencv中)
+
+最近几个版本的 MacOS 对权限管理非常严格,需要从命令行启动 Adapter(允许访问摄像头)
+
+
+### 更新Adapter后,Jupyterlab页面显示白色
+
+是因为jupyterlab版本升级造成的。
+
+删除 `C:\Users\
-
-开启 **extension_eim_trigger** 插件后,
## 步骤 4:hello world
+开启 **extension_eim_trigger** 插件后
选择对应的 Scratch3 插件:EIM
@@ -80,4 +78,4 @@ def trigger():
## 参考
-- [使用 Python 拓展 Scratch 的能力](https://blog.just4fun.site/scratch-adapter-eim-script.html)
+- [使用 Python 拓展 Scratch 的能力](https://wwj718.github.io/scratch-adapter-eim-script.html)
diff --git a/docs/extension_guide/etoys.md b/docs/extension_guide/etoys.md
new file mode 100644
index 0000000..bf7c54f
--- /dev/null
+++ b/docs/extension_guide/etoys.md
@@ -0,0 +1,93 @@
+# Etoys
+
+## 介绍
+
+
+
+[Etoys](http://www.squeakland.org/) 是:
+
+- 一种教育工具,向孩子们传授强大的思想(powerful ideas)
+- 丰富的媒体创作环境和可视化编程系统
+- 开放系统,几乎适用于所有个人电脑
+
+Etoys 的开发始于迪斯尼,由艾伦·凯(Alan Kay)主导,受 Seymour Papert 的 Logo 语言影响,支持建构主义学习。
+
+开发团队包括:Scott Wallace、Ted Kaehler、John Maloney 和 Dan Ingalls。
+
+极大影响了 Scratch(John Maloney 是 Scratch 的首席架构师)
+
+## 截图
+
+
+
+
+
+## 接入 Adapter
+
+Etoys 的最后一次更新是 2012 年(5.0 版本)。
+
+我们试图通过将其接入 Adatper,使其得到 Adapter 连接的整个生态:物联网、AI、开源硬件... 使 Etoys 强大的表达能力与新的技术融合。
+
+### 思路
+接入的思路是"hack"。
+
+Etoys与外部通信的方式并不多,在 **百宝箱** 里,仅发现了Scratch客户端,可以与外部通信。
+
+
+
+于是我们通过将 Adapter 伪装成 Scratch 1.3,来与Etoys通信,消息流向是(`Etoys->Adatper->Scratch3.0`)
+
+由于百宝箱里的 Scratch客户端是socket client,所以更复杂的通信也是可能的,但`Etoys->Adatper->Scratch3.0`是我自己的典型使用场景。 更多细节参考: [Etoys 学习笔记: 与 Scratch 互操作](https://wwj718.github.io/post/%E5%B0%91%E5%84%BF%E7%BC%96%E7%A8%8B/etoys-learning-note/).
+
+也欢迎你自己进行hack :)
+
+### 使用
+使用方式很简单,在Adapter 中开启 `extension_socket_server` 插件(如果不存在该插件,到[插件市场](/extension_guide/extension_market/)下载即可),源码在[extension_socket_server.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_socket_server.py)
+
+开启插件后,加载demo程序,并点击绿旗运行它。
+
+[Scratch-Etoys](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/Scratch-etoys.sb3)
+
+之后在 Etoys 里使用 broadcask 积木 即可:
+
+
+
+!!! 提醒
+ 在使用具体积木时,需要先建立连接,点击 Etoys里Scratch客户端即可,如果连接顺利,猫的眼睛会睁开。
+
+以下是一个简单的例子:
+
+
+
+使用Etoys里的按钮打开本地目录和CodeLab主页,背后利用到了 Adapter Python Extension的能力:
+
+
+
+一切都是消息!
+
+## Etoys 与 Scratch 对比
+Scratch适合入门,它通过给定清晰的结构,提供更多确定性,让入门变得容易(不必担心搞乱环境)。
+
+随着项目变得更复杂,Etoys是更理想的选择,因其拥有继承自Smalltalk的强大环境和表达能力,惊人的一致性,彻底的面向对象,随着项目逐渐生长,复杂度总是在可控的范围内(因为消息-对象隐喻)。
+
+随着项目变得复杂,Scratch用户需要掌握越来越多的“技巧”,编程成为一件搜罗和记忆许多技巧(特例)的乏味工作(就像传统计算机教育),环境无法提供更多的支持。
+
+Etoys/Squeak 为“Scratch下一步是什么?”提供了理想的答案: `Scratch -> Etoys -> Squeak(Smalltalk)`
+
+## 教育者
+Alan Kay 和 Etoys社区围绕Etoys写了许多精彩的文章,推荐阅读。也许是有史以来关于向孩子传授 powerful ideas 最精彩的文章之一。
+
+诸如:
+
+* [Squeak Etoys Authoring & Media](http://www.squeakland.org/content/articles/attach/etoys_n_authoring.pdf)
+* [Kedama: A GUI-based Interactive Massively Parallel Particle Programming System](http://www.vpri.org/pdf/tr2005001_ohshima_kedama.pdf)
+
+更多文章可以从[Etoy resources](http://www.squeakland.org/resources/articles/) 和 [Viewpoints Research Institute](http://www.vpri.org/)里找
+
+
+## 进阶
+你可以参考[Etoys 学习笔记: 与 Scratch 互操作](https://wwj718.github.io/post/%E5%B0%91%E5%84%BF%E7%BC%96%E7%A8%8B/etoys-learning-note/)自行构建功能更丰富的Server,使用 [Adapter Node](/dev_guide/Adapter-Node/) 将其接入Adapter生态。
+
+## 参考
+
+- [Etoys 学习笔记: 与 Scratch 互操作](https://wwj718.github.io/post/%E5%B0%91%E5%84%BF%E7%BC%96%E7%A8%8B/etoys-learning-note/)
diff --git a/docs/extension_guide/extension_market.md b/docs/extension_guide/extension_market.md
index d940a94..b3901c5 100644
--- a/docs/extension_guide/extension_market.md
+++ b/docs/extension_guide/extension_market.md
@@ -2,11 +2,15 @@
CodeLab Adapter 3.0 有一个统一的插件市场,可以方便下载到新的插件,就像我们在 vscode 或 sublime text 里的体验的那种插件系统,有个体面的 UI,而不是使用 curl 或者 wget 去 github 里手动下载。
-
+
+
+
+
+
作为演示我们下载了插件市场里的一个番茄工作法插件,这个插件的功能很简单(源码也是公开的): 每 25 分钟提醒编程者起来看看窗外风景。
-
+
下载完成之后,不需要重启软件,即可在 Scratch 和 Web UI 中看到新下载的插件,点击运行它:每 25 分钟,你就会收到一条信息提示你做个短途休息。
diff --git a/docs/extension_guide/extension_python_kernel.md b/docs/extension_guide/extension_python_kernel.md
index c7bfe9c..17745b0 100644
--- a/docs/extension_guide/extension_python_kernel.md
+++ b/docs/extension_guide/extension_python_kernel.md
@@ -1,20 +1,13 @@
-# Python eval kernel
+# Python
-## 依赖
+## 介绍
+
-{!utils/dependence.md!}
+此扩展可以将 Python 代码交给 Adapter 执行(eval),并获取结果。
-## 步骤 1:打开 Codelab Adapter
+## hello world
-{!utils/open_adapter.md!}
-
-## 步骤 2:打开 Codelab Scratch3
-
-{!utils/open_scratch.md!}
-
-## 步骤 3:hello world
-
-选择对应的 Scratch3 插件:Python 插件
+打开 Scratch Python 插件

@@ -26,7 +19,14 @@

-Python 插件将以 [eval](https://docs.python.org/zh-cn/3.7/library/functions.html#eval) 执行 Python 代码(只能执行表达式),如果你想使用 exec ,文末有指导。
+## 积木说明
+暂无
+
+## 进阶
+
+### 使用技巧
+
+#### 自定义积木
你可以在插件中添加新的类,来自定义新功能, 我们做了一个范例: [PyHelper 源码](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_python.py#L18)。你可以使用 `PyHelper.open_url("https://www.codelab.club/")`来为 Scratch 引入打开网页的功能。
@@ -48,11 +48,47 @@ Python 插件将以 [eval](https://docs.python.org/zh-cn/3.7/library/functions.h
你可以在插件里添加更多的类似`PyHelper`的自定义类,来为 Scratch 引入更多新的能力,使用 Python 就行!
-## 延伸
+#### 与网络交互(requests)
+
+考虑到网络极为强大,Python 插件允许用户在 Scratch 中直接与 requests 交互(只支持表达式,形如`requests.get(...), requests.post(...)`)。
+
+由于 requests 的 API 极为漂亮(支持链式风格),你几乎可以单个表达式中干绝大多数的事情!
+
+[requests 文档](https://docs.python-requests.org/zh_CN/latest/)。
+
+一些典型的用例包括:
+
+* [两个 Adapter 之间的消息通信](https://adapter.codelab.club/user_guide/%E4%B8%8E%E5%A4%96%E9%83%A8%E7%B3%BB%E7%BB%9F%E9%80%9A%E4%BF%A1/#requests)
+* 触发 webhook
+* 请求[公开的网络 API](https://github.com/public-apis/public-apis)
+* 与自己搭建的 web server 交互
+
+##### demo
+```py
+requests.get("http://httpbin.org/get")
+# 链式写法
+requests.get("http://httpbin.org/get").text
+requests.get("http://httpbin.org/get").json()
+
+# 携带参数
+requests.get("http://httpbin.org/get", params={"name": "codelab"})
+
+# post
+requests.post('http://httpbin.org/post', data = {'key':'value'})
+```
+
+##### 一些奇怪的想法
+* 通过与带有存储能力的 API 结合,可以构建出类似云变量这种东西
+ * 或者使用 [json-server](https://github.com/typicode/json-server) 临时搭建一个
+
+### 项目链接
+
+
+#### 文件储存案例
再来做一个例子,[@HansonXie](http://www.concentric-circle.com/author/admin/) 给我写了封邮件,说想写一个extension或者node来进行文件存储,希望用Python来做,而不是Javascript。在此我写个简单例子
-我们可以使用 [Jupyterlab](https://adapter.codelab.club/extension_guide/jupyterlab/) 编辑[extension_python.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_python.py). 在其中增加一个新的助手类,来负责存储文件
+我们可以使用 [Jupyterlab](/extension_guide/jupyterlab/) 编辑[extension_python.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_python.py). 在其中增加一个新的助手类,来负责存储文件
```python
class StorageHelp:
@@ -86,7 +122,12 @@ eval(code, {"__builtins__": None}, {

-# 最后
+## FAQ
+### 如何工作
+
+!!! 提醒
+ exec 可能带来各种安全风险,此外,eval也更符合我们采用的`对象/消息`隐喻。
+ 如果你确实需要exec,可以自行构建插件, 参考[python_exec.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/python_exec.py)
内置在 Adapter 里的 Python 插件以 [eval](https://docs.python.org/zh-cn/3.7/library/functions.html#eval) 执行 Python 代码(只能执行表达式),如果你希望以功能更轻大的 [exec](https://docs.python.org/zh-cn/3.7/library/functions.html#exec) (可执行任何 Python 语句)执行 Python 代码,可以在[插件市场](/extension_guide/extension_market/)里下载 [extension_python_exec 插件](/extension_guide/python_exec/)。
@@ -98,11 +139,11 @@ eval(code, {"__builtins__": None}, {
我们之没有将 extension_python_exec 内置在 Adapter 中,而是希望用户在需要时自行下载,因为它的功能过于强大,可能会带来一下风险,所以选择权交由使用者。强大的能力通常会伴随风险,当然我们不会做太多限制,由你决定:)
-# 参考
+## 参考
-- [将 codelab-adapter 用作 Python 解释器](https://blog.just4fun.site/scratch3-adapter-as-python-interpreter.html)
+- [将 codelab-adapter 用作 Python 解释器](https://wwj718.github.io/scratch3-adapter-as-python-interpreter.html)
diff --git a/docs/extension_guide/ha.md b/docs/extension_guide/ha.md
index 6e3970e..7bf3208 100644
--- a/docs/extension_guide/ha.md
+++ b/docs/extension_guide/ha.md
@@ -1,4 +1,4 @@
# Tutorial
hello world
-参考[安装和配置 Home Assistant](https://adapter.codelab.club/Neverland/HA/)
\ No newline at end of file
+参考[安装和配置 Home Assistant](/Neverland/HA/)
\ No newline at end of file
diff --git a/docs/extension_guide/halocode.md b/docs/extension_guide/halocode.md
new file mode 100644
index 0000000..3b42788
--- /dev/null
+++ b/docs/extension_guide/halocode.md
@@ -0,0 +1,4 @@
+# 光环板
+
+
+光环板[支持mqtt](https://makeblock-micropython-api.readthedocs.io/zh/latest/public_library/Third-party-libraries/mqtt.html), 可通过[mqtt协议接入](https://adapter.codelab.club/extension_guide/iot/)
\ No newline at end of file
diff --git a/docs/extension_guide/imageData.md b/docs/extension_guide/imageData.md
index 28262f1..a0f2f9b 100644
--- a/docs/extension_guide/imageData.md
+++ b/docs/extension_guide/imageData.md
@@ -1,2 +1,24 @@
# Tutorial
-hello world
\ No newline at end of file
+用于获取和设置舞台区数据,具体而言:
+
+* 获取当前舞台图像、当前视频图像
+ * 这些数据的消费者包括:
+ * [extension_stage.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_stage.py)
+ * [node_physical_blocks2.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/nodes_v3/node_physical_blocks2.py)
+* 获取/设置当前角色的自定义造型
+
+# demo
+大多数的 physical blocks 项目都使用到了`获取当前视频图像`.
+
+而以下项目使用到了`获取/设置当前角色的自定义造型`:
+
+
+
+
+
+## 与 physical blocks 2.0 配合使用
+
+
+
+!!! 提醒
+ 如果你想切换分辨率,Adapter的版本需要`>=3.7.4`, 或者到插件市场下载最新的physical blocks 2.0插件。 此外值得注意的是,分辨率越高,刷新率越慢(很大原因是因为传输的数据大造成的)
\ No newline at end of file
diff --git a/docs/extension_guide/intelino.md b/docs/extension_guide/intelino.md
new file mode 100644
index 0000000..c429005
--- /dev/null
+++ b/docs/extension_guide/intelino.md
@@ -0,0 +1,23 @@
+# intelino
+
+入门用户推荐使用最新的 [mu-editor](https://codewith.mu/en/download) 编辑器
+
+如果你使用其他 Python 环境,请确保`Python >= 3.8`
+
+## windows
+
+需要 windows10 或 windows11
+
+windows10: `pip install intelino-trainlib bleak==0.12.1`
+
+windows11: `pip install intelino-trainlib`
+
+## macOS & Linux
+
+`pip install intelino-trainlib`
+
+## 相关资料
+
+- 源码: [intelino-trainlib-py](https://github.com/intelino-code/intelino-trainlib-py)
+ - 案例: [examples](https://github.com/intelino-code/intelino-trainlib-py/tree/master/examples)
+- 文档: [readthedocs](https://intelino-trainlib-async-py.readthedocs.io/en/latest/index.html)
diff --git a/docs/extension_guide/iot.md b/docs/extension_guide/iot.md
index 28262f1..6c97955 100644
--- a/docs/extension_guide/iot.md
+++ b/docs/extension_guide/iot.md
@@ -1,2 +1,60 @@
-# Tutorial
-hello world
\ No newline at end of file
+# MQTT 插件
+MQTT broker 需要支持 wss(websockets) 协议, 才能在Scratch里连接它
+
+CodeLab合作伙伴[英荔教育](https://aimaker.space/about)为CodeLab社区用户提供一个免费 MQTT broker:
+
+
+* url: mqtt.longan.link
+* 默认用户名/密码: guest/test
+* tcp port: 1883
+* tls port 8883
+* websockets port: 8084
+
+# Demo
+## scratch client
+[scratch demo](https://create.codelab.club/projects/22163/editor/)
+
+## python client
+基于 [paho-mqtt](https://github.com/eclipse/paho.mqtt.python)
+
+```py
+import paho.mqtt.client as mqtt
+
+# The callback for when the client receives a CONNACK response from the server.
+def on_connect(client, userdata, flags, rc):
+ # print("Connected with result code "+str(rc))
+ if rc == 0:
+ print('已连接')
+ else:
+ print('连接出错!')
+ # Subscribing in on_connect() means that if we lose the connection and
+ # reconnect then subscriptions will be renewed.
+ client.subscribe("test")
+
+# The callback for when a PUBLISH message is received from the server.
+def on_message(client, userdata, msg):
+ print(msg.topic+" "+str(msg.payload))
+
+client = mqtt.Client()
+client.on_connect = on_connect
+client.on_message = on_message
+client.username_pw_set('guest', 'test')
+
+client.connect("mqtt.longan.link", 1883, 60)
+
+# Blocking call that processes network traffic, dispatches callbacks and
+# handles reconnecting.
+# Other loop*() functions are available that give a threaded interface and a
+# manual interface.
+client.loop_forever() # client.loop_start() 是非阻塞的
+```
+
+## MicroBlocks demo
+[MicroBlocks demo](https://microblocks.codelab.club/#scripts=GP%20Scripts%0Adepends%20%27MQTT%27%20%27WiFi%27%0A%0Ascript%20429%20-138%20%7B%0AwhenStarted%0Acomment%20%271.%20connect%20wifi%27%0A%27wifi%20connect%20to%27%20%27Elite_1006%27%20%2720130530%27%203%0AwaitMillis%201000%0Acomment%20%272.%20connect%20MQTT%20broker%27%0A%27MQTT%20connect%20to%27%20%27mqtt.longan.link%27%20128%20%27MicroBlocks_client%27%20%27guest%27%20%27test%27%0Acomment%20%27subscribe%20topic%27%0A%27MQTT%20sub%27%20%27microblocks%27%0AsendBroadcast%20%27go%21%27%0A%7D%0A%0Ascript%20429%20155%20%7B%0AwhenBroadcastReceived%20%27go%21%27%0Acomment%20%27receive%20mqtt%20message%27%0Aforever%20%7B%0A%20%20if%20%28%27MQTT%20connected%27%29%20%7B%0A%20%20%20%20event%20%3D%20%28%27last%20MQTT%20event%27%29%0A%20%20%20%20if%20%28isType%20event%20%27list%27%29%20%7B%0A%20%20%20%20%20%20sayIt%20%27topic%27%20%28%27MQTT%20event%20topic%27%20event%29%20%27%2C%20payload%27%20%28%27MQTT%20event%20payload%27%20event%29%0A%20%20%20%20%7D%0A%20%20%7D%20else%20%7B%0A%20%20%20%20sayIt%20%27try%20to%20connect%20...%27%0A%20%20%20%20waitMillis%20500%0A%20%20%20%20%27MQTT%20connect%20to%27%20%27mqtt.longan.link%27%20128%20%27MicroBlocks_client%27%20%27guest%27%20%27test%27%0A%20%20%7D%0A%7D%0A%7D%0A%0Ascript%20581%20120%20%7B%0Acomment%20%27publish%20topic%20payload%27%0A%27MQTT%20pub%27%20%27scratch%27%20%27Hello%21%27%0A%7D%0A%0Ascript%20403%20-168%20%7B%0Acomment%20%27work%20with%20https%3A%2F%2Fcreate.codelab.club%2Fprojects%2F22163%2Feditor%2F%27%0A%7D%0A%0A)
+
+
+# 参考
+* [MQTT.js](https://github.com/mqttjs/MQTT.js): 提供 cli 工具
+* [mosquitto](https://github.com/eclipse/mosquitto)
+* [paho-mqtt](https://github.com/eclipse/paho.mqtt.python)
+* [gmqtt](https://github.com/wialon/gmqtt)
\ No newline at end of file
diff --git a/docs/extension_guide/jupyterlab.md b/docs/extension_guide/jupyterlab.md
index 14d0777..69dffbf 100644
--- a/docs/extension_guide/jupyterlab.md
+++ b/docs/extension_guide/jupyterlab.md
@@ -1,6 +1,8 @@
-# [JupyterLab](https://jupyterlab.readthedocs.io/en/stable/)
+# JupyterLab
+
-JupyterLab 是 jupyter notebook 的下一代产品。
+## 介绍
+[JupyterLab](https://jupyterlab.readthedocs.io/en/stable/) 是 jupyter notebook 的下一代产品。
Jupyter Notebook(前身是IPython Notebook)是一个基于Web的交互式计算环境。
@@ -16,24 +18,13 @@ CodeLab Adapter 将其集成到插件,如果想编辑代码,诸如
或者任何时候你想学习 Python ,JupyterLab 都是你理想的伙伴。
-# Tutorial
-## 依赖
+## hello world
+在 webUI 里运行 **extention_jupyterlab** 插件。
-{!utils/dependence.md!}
+
-## 步骤 1:打开 Codelab Adapter
+---
-{!utils/open_adapter.md!}
-
-运行 **extention_jupyterlab** 插件。
-
-!!! 提醒
- 完整版已经内置了一切依赖。
- 如果你是有精简版,确保你已经[安装了 Python3](/Python_Projects/install_python/)。
- 你不必手动安装 **jupyterlab** ,运行插件,CodeLab Adapter 会为你其余的一切。
- 当然你也可以在命令行里手动安装它。
-
-## 步骤 2:使用 jupyterlab
jupyterlab 默认将打开 [Adapter主目录](/user_guide/FAQ/#adapter)。

@@ -48,3 +39,92 @@ jupyterlab 默认将打开 [Adapter主目录](/user_guide/FAQ/#adapter)。
6. Adapter 运行日志,当你需要[调试](/dev_guide/debug/) extension 时,查看日志将很有帮助。
你可以使用 jupyterlab 随意修改它们。别担心改坏了。如果发现修改后 Adapter无法正常运行。则将整个[ Adapter 主目录](/user_guide/FAQ/#adapter)删除即可,重启 Adapter,你将得到一个崭新的 Adapter 主目录。它是为你学习而构建的环境,别担心玩坏它,尽情探索吧。
+
+## 积木说明
+暂无
+
+## 项目链接
+暂无
+
+## FAQ
+
+### 启用 Jupyterlab 插件,没有自动打开 Jupyterlab
+可能是因为你的系统用户名(windows系统)是中文,目前 Jupyterlab 存在这个 bug, 官方正在修复中。
+
+我们目前给出了一个手动打开方案:
+
+1. 启动 Jupyterlab 插件
+2. 稍等 3-5秒, 之后在浏览器里打开`localhost:8888` (如果打不开,则试试`localhost:8889`)
+3. 复制 `Adapter token` 到 Jupyterlab 登陆框里
+
+
+
+
+
+### 安装第三方库
+```py
+import pip
+# 举个例子: 安装 furl
+pip.main(["install", "furl"])
+# 你也可以使用国内的源:
+# pip.main(['install', 'furl', '-i', 'https://mirrors.aliyun.com/pypi/simple'])
+# 针对ssl证书有问题的用户 pip.main(['install', 'furl', '-i', 'http://mirrors.aliyun.com/pypi/simple', "--trusted-host", "mirrors.aliyun.com"])
+```
+
+安装完之后,需要在 jupyterlab 重启kernel,也可以重启 jupyterlab。
+
+### 列出所有库
+```py
+import pip
+pip.main(["freeze"])
+```
+
+### 汉化
+`Adapter >= 3.3.1`,jupyterlab 版本升级到 3.0,支持切换语言:
+
+
+
+
+### 精简版(linux/RPI)如何安装 jupyterlab
+完整版已经内置了一切依赖。
+
+如果你是有精简版,确保你已经[安装了 Python3](/Python_Projects/install_python/)。
+
+你不必手动安装 **jupyterlab** ,运行插件,CodeLab Adapter 会为你其余的一切。
+
+当然你也可以在命令行里手动安装它。
+
+### 如何启动实时协作模式
+[实时协作模式](https://jupyterlab.readthedocs.io/en/stable/user/rtc.html)对于结对编程、远程教学以及课堂教学可能都有帮助。
+
+启动实施模式的方法是,使用 jupyterlab 打开 extensions 目录里的 `extension_jupyterlab.py` 插件,将 `self.allow_collaborative`改为True。 之后重启 Jupyterlab 插件。
+
+此时,同一个局域网里的任何电脑都可以进入同一个 Jupyterlab 里,进行实时协作。
+
+具体方法是:
+
+1. 在其他电脑上的浏览器里(可以是移动设备!),打开启用实时协作的Jupyterlab的地址入口(形如`192.168.31.100:8888`), 之后输入token,token与Adapter token一样。
+2. 结对编程者打开同一个notebook文件(或者 `.py` 文件)。
+
+### 运行 Python 脚本
+
+在 Jupyterlab 中打开 **终端**.
+
+MacOS:
+
+`./Support/bin/python3 ./adapter_home/notebooks/hello.py`
+
+Windows:
+
+`.\src\python\python .\src\adapter_home\notebooks\hello.py`
+
+### 为何 MacOS 下无法在jupyterlab使用摄像头(如在opencv中)
+
+最近几个版本的 MacOS 对权限管理非常严格,需要从命令行启动 Adapter(允许访问摄像头)
+
+
+### 更新Adapter后,Jupyterlab页面显示白色
+
+是因为jupyterlab版本升级造成的。
+
+删除 `C:\Users\ +
+之后进入 interface,开始操作即可。
+
+输出的 osc 信号将进入 Adapter,继而可以在 Scratch 的 OSC 积木中访问它。
+
+一则 osc 消息由 2 部分构成:
+
+- address(地址,类似 url)
+- args(参数,是个 list), 每一个参数的含义请参考具体 OSC 软件的文档说明
+
+address 和 args 可以在具体 osc 软件中找到。
+
+## FAQ
+
+### 有什么推荐的 OSC 面板(client)
+我目前最喜欢的 OSC client 是:
+
+* `Syntien`
+* `Unipad`
+
+#### Syntien
+Syntien 提供了丰富的控制面板
+
+
+
+之后进入 interface,开始操作即可。
+
+输出的 osc 信号将进入 Adapter,继而可以在 Scratch 的 OSC 积木中访问它。
+
+一则 osc 消息由 2 部分构成:
+
+- address(地址,类似 url)
+- args(参数,是个 list), 每一个参数的含义请参考具体 OSC 软件的文档说明
+
+address 和 args 可以在具体 osc 软件中找到。
+
+## FAQ
+
+### 有什么推荐的 OSC 面板(client)
+我目前最喜欢的 OSC client 是:
+
+* `Syntien`
+* `Unipad`
+
+#### Syntien
+Syntien 提供了丰富的控制面板
+
+ +
+ +
+ +
+
+
+ +
+它甚至允许你自定义面板!
+
+
+
+它甚至允许你自定义面板!
+
+ +
+
+
+#### Unipad
+
+
+
+
+
+#### Unipad
+
+ +
+
+
+ +
+
+
+ +
+
+Unipad 提供多种游戏手柄界面,这些可以很好地跟Scratch项目结合! OSC 如此高的刷新率,几乎没有任何延迟
+
+### 有什么推荐的兼容 OSC 的软件
+
+* 音乐: [SonicPi](/extension_guide/sonicPi/)
+* AI:[Wekinator](http://www.wekinator.org/)
+* blender/unity
\ No newline at end of file
diff --git a/docs/extension_guide/overdrive.md b/docs/extension_guide/overdrive.md
new file mode 100644
index 0000000..76831b3
--- /dev/null
+++ b/docs/extension_guide/overdrive.md
@@ -0,0 +1,48 @@
+# Overdrive
+
+## 介绍
+
+
+> 与你的朋友或人工智能来一场速度与激情的较量。
+
+Overdrive 是一款可编程赛车,内置多种传感器,在特制的跑道上运行时能定位到自身的位置。此扩展可以实时控制通过蓝牙连接的赛车。
+
+## hello world
+打开 Scratch overdrive 插件。
+
+使用连接图标,连接小车。
+
+跑起来:
+
+
+
+## 积木说明
+暂无
+
+## 项目链接
+### Demo 1: microbit 无线油门
+
+
+
+
+[microbit-overdrive](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/microbit-overdrive.sb3)
+
+
+### Demo 2
+
+
+
+
+
+[overdrive-demo](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/overdrive-demo.sb3)
+
+## FAQ
+### PRO_KEY是什么?如何获取?
+PRO_KEY 是 CodeLab 尝试服务合作伙伴和企业用户的高级特性。
+
+使用 PRO_KEY 可以启用 Adapter 的高级特性: 激光雷达、overdrive...
+
+欢迎发送邮件咨询/合作/购买: `wuwenjie@codelab.club`
+
+### [overdrive 居中运行](https://create.codelab.club/projects/10388/) 有时会一直摇摆
+是的,造成这个问题的原因是,小车有时报告的offset信息不准确,目前认为是固件问题,暂无办法。
\ No newline at end of file
diff --git a/docs/extension_guide/overdrive2.md b/docs/extension_guide/overdrive2.md
new file mode 100644
index 0000000..1b5fab6
--- /dev/null
+++ b/docs/extension_guide/overdrive2.md
@@ -0,0 +1,2 @@
+# overdrive
+参考[overdrive](https://adapter.codelab.club/extension_guide/overdrive/)
\ No newline at end of file
diff --git a/docs/extension_guide/physical_blocks.md b/docs/extension_guide/physical_blocks.md
index dab09c6..f718586 100644
--- a/docs/extension_guide/physical_blocks.md
+++ b/docs/extension_guide/physical_blocks.md
@@ -18,36 +18,24 @@ physical blocks 在软件层面是一个 CodeLab Adapter插件,由于 CodeLab
* 运行程序!
-->
+!!! 提醒
+ 建议使用2.0版本: [physical blocks 2.0](/extension_guide/physical_blocks2/)。 不久将弃用1.0版本。
+
使用 physical blocks,可以在一张桌子上对实物进行编程。
+Windows 和 Mac 用户开箱可用。 Linux需要安装依赖(参考文末)
+
+建议以[入门案例](#_3)为模版。
+
参考:
- [CodeLab DynamicTable: A Seeing World](https://www-old.codelab.club/blog/codelab-dynamictable-a-seeing-world/)
- [CodeLab DynamicTable: 一个可实施的技术方案](https://www-old.codelab.club/blog/codelab-dynamictable-an-instance/)
-## 提醒
-
-第一次运行插件,Windows 和 Mac 用户会自行按照依赖: `opencv-contrib-python`, 依赖比较大(`> 60MB`), 耐心等待 1 分钟左右,安装完成会会弹出通知。
-
-Linux 用户需要手动安装 `opencv-contrib-python`(有系统依赖)。
-
-### 树莓派用户
-
-安装依赖系统
-
-```bash
-sudo apt-get install libjpeg-dev libtiff5-dev libjasper-dev libpng12-dev
-sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev
-sudo apt-get install libxvidcore-dev libx264-dev
-sudo apt install libatlas-base-dev
-sudo apt-get install qt4-dev-tools
-sudo apt-get install libhdf5-dev libhdf5-serial-dev libhdf5-103
-```
-
-之后安装`opencv-contrib-python`
-
-- `pip3 install opencv-contrib-python==3.4.6.27`
+## 积木介绍
+
+可以从 [arucogen](https://chev.me/arucogen/) 查询 ArUco marker id
## Demo
@@ -65,7 +53,7 @@ sudo apt-get install libhdf5-dev libhdf5-serial-dev libhdf5-103
- [Scratch-spell-demo.sb3](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/Scratch-spell-demo.sb3){target=\_blank} : 获取 marker id 列表(从左到右,从上到下)
## 更多案例
-* [第一期的直播演示项目](https://www.codelab.club/blog/the-first-live-showcase-projects-code/)
+* [第一期的直播演示项目](https://www-old.codelab.club/blog/the-first-live-showcase-projects-code/)
* [智能家居展厅](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/Scratch-spelling-iot-show.sb3)
# FAQ
@@ -73,7 +61,7 @@ sudo apt-get install libhdf5-dev libhdf5-serial-dev libhdf5-103
### 如何打印 Marker
我们提供了一份30张的版本:
-
+
你可以从 [arucogen](https://chev.me/arucogen/) 里打印(建议从编号1开始)
@@ -89,4 +77,25 @@ sudo apt-get install libhdf5-dev libhdf5-serial-dev libhdf5-103
aruco_dict = cv2.aruco.Dictionary_get(cv2.aruco.DICT_4X4_100)
```
-关于不同的marker数量决定了字典的大小,越小的数字,鲁棒性越好。 考虑到大多数用户的场景,50个是够用的,所以我们默认采用50.
\ No newline at end of file
+关于不同的marker数量决定了字典的大小,越小的数字,鲁棒性越好。 考虑到大多数用户的场景,50个是够用的,所以我们默认采用50.
+
+### Linux 用户
+
+Linux 用户需要手动安装 `opencv-contrib-python`(有系统依赖)。
+
+#### 树莓派用户
+
+安装依赖系统
+
+```bash
+sudo apt-get install libjpeg-dev libtiff5-dev libjasper-dev libpng12-dev
+sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev
+sudo apt-get install libxvidcore-dev libx264-dev
+sudo apt install libatlas-base-dev
+sudo apt-get install qt4-dev-tools
+sudo apt-get install libhdf5-dev libhdf5-serial-dev libhdf5-103
+```
+
+之后安装`opencv-contrib-python`
+
+- `pip3 install opencv-contrib-python==3.4.6.27`
diff --git a/docs/extension_guide/physical_blocks2.md b/docs/extension_guide/physical_blocks2.md
new file mode 100644
index 0000000..b3aae75
--- /dev/null
+++ b/docs/extension_guide/physical_blocks2.md
@@ -0,0 +1,106 @@
+# Tutorial
+
+## 介绍
+physical blocks 2.0,新的更新我们都将在这个版本是进行,[physical blocks 1.0](/extension_guide/physical_blocks/)在未来将弃用。
+
+使用 physical blocks,可以在一张桌子上对实物进行编程。
+
+Windows 和 Mac 用户开箱可用。 Linux需要安装依赖(参考文末)
+
+!!! 提醒
+ CodeLab Adapter版本 `>= 3.7.3`
+
+参考:
+
+- [CodeLab DynamicTable: A Seeing World](https://www-old.codelab.club/blog/codelab-dynamictable-a-seeing-world/)
+- [CodeLab DynamicTable: 一个可实施的技术方案](https://www-old.codelab.club/blog/codelab-dynamictable-an-instance/)
+
+## 积木介绍
+
+
+
+可以从 [arucogen](https://chev.me/arucogen/) 查询 ArUco marker id
+
+## Demo
+
+
+
+
+
+
+
+## 入门案例
+
+分享两个入门案例:
+
+- [physical-blocks2-angle-demo](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/physical-blocks2-angle-demo.sb3){target=\_blank} : 获取 marker 旋转角
+- [physical-blocks2-spell-demo](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/physical-blocks2-spell-demo.sb3){target=\_blank} : 获取 marker id 列表(从左到右,从上到下)
+
+## 更多案例
+* [第一期的直播演示项目](https://www-old.codelab.club/blog/the-first-live-showcase-projects-code/)
+* [智能家居展厅](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/Scratch-spelling-iot-show.sb3)
+
+# FAQ
+
+### 刷新率/FPS
+在 MacOS(2.3 GHz Intel Core i5)下,大约达到10帧的刷新率
+
+目前尚未发布的 Pro 版本大约是 20 帧的刷新率
+
+可使用以下技巧观察刷新率:
+
+
+
+### 与1.0版本的区别?
+标记列表默认是字符串(序列化之后),可以随意与scrath积木组合(诸如`xx包含xx`积木),避免因为操作list引起的崩溃(诸如将list保存为变量)。
+
+在2.0中,直到主动使用JSON parse积木解析后,它才称为列表。相关操作参考:[json积木](/extension_guide/json/),也可参考前边的例子: [physical-blocks2-spell-demo](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/physical-blocks2-spell-demo.sb3){target=\_blank}
+
+此外2.0 只使用一个积木更新数据,提高标签存在的稳定性(也提高速度),其中一种典型的编程模式是: 在一次更新数据之后的积木都对应更新瞬间的视野状态。而不像1.0,每个积木都有各自瞬间的视野。
+
+### 如何打印 Marker
+我们提供了一份30张的版本:
+
+
+
+你可以从 [arucogen](https://chev.me/arucogen/) 里打印(建议从编号1开始)
+
+更多细节参考[CodeLab DynamicTable: 一个可实施的技术方案](https://www-old.codelab.club/blog/codelab-dynamictable-an-instance/)
+
+### 默认的Marker支持250种不同类型(marker id)
+默认是`4X4_250`(最多250种)的marker, 你可以选择:
+
+* `4x4_50`(最多50种)
+* `4x4_250`(最多250种)
+* `4x4_100`(最多100种)
+* `4x4_1000`(最多1000种)
+
+选择之后请修改(推荐使用[JupyterLab](/extension_guide/jupyterlab/))插件里对应的代码(104行):
+
+```python
+# aruco_dict = cv2.aruco.Dictionary_get(cv2.aruco.DICT_4X4_250)
+aruco_dict = cv2.aruco.Dictionary_get(cv2.aruco.DICT_4X4_1000)
+```
+
+关于不同的marker数量决定了字典的大小,越小的数字,鲁棒性越好。
+
+### Linux 用户
+
+Linux 用户需要手动安装 `opencv-contrib-python`(有系统依赖)。
+
+#### 树莓派用户
+
+安装依赖系统
+
+```bash
+sudo apt-get install libjpeg-dev libtiff5-dev libjasper-dev libpng12-dev
+sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev
+sudo apt-get install libxvidcore-dev libx264-dev
+sudo apt install libatlas-base-dev
+sudo apt-get install qt4-dev-tools
+sudo apt-get install libhdf5-dev libhdf5-serial-dev libhdf5-103
+```
+
+之后安装`opencv-contrib-python`
+
+- `pip3 install opencv-contrib-python==3.4.6.27`
diff --git a/docs/extension_guide/pi-top.md b/docs/extension_guide/pi-top.md
new file mode 100644
index 0000000..306d5ff
--- /dev/null
+++ b/docs/extension_guide/pi-top.md
@@ -0,0 +1,102 @@
+# pi-top
+
+# 介绍
+
+
+
+## 接管 pi-top 的思路
+
+参考[机械臂](https://adapter.codelab.club/extension_guide/robotic-arm/),因其都是树莓派。
+
+
+## hello world
+
+### 用户电脑配置
+
+假设用户使用自己的电脑编程(运行 Adapter 和 Scratch)
+
+在运行Adapter之前,设置[配置项](https://adapter.codelab.club/user_guide/settings/) `OPEN_MESSAGE_HUB = true`
+
+之后运行 CodeLab Adapter.
+
+### 树莓派配置
+
+在机械臂树莓派里安装 [codelab_adapter_client_python](https://github.com/CodeLabClub/codelab_adapter_client_python): `pip3 install codelab_adapter_client`
+
+创建 `node_PiTop.py` :
+
+```py
+# fork 自: https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_python.py
+import time
+from loguru import logger
+
+from codelab_adapter_client import AdapterNode
+
+from pitop import Pitop
+
+
+# Set up pi-top
+pitop = Pitop()
+
+# Say hi!
+# pitop.miniscreen.display_text("Hello!")
+
+class PythonKernelExtension(AdapterNode):
+
+ NODE_ID = "eim/PiTop"
+ HELP_URL = "http://adapter.codelab.club/"
+ WEIGHT = 95
+ VERSION = "0.1" # extension version
+ DESCRIPTION = "PiTop"
+
+ def __init__(self, **kwargs):
+ adapter_host = "192.168.31.164" # 运行Adapter的计算机IP
+ super().__init__(codelab_adapter_ip_address = adapter_host, **kwargs)
+ # self.PyHelper = PyHelper()
+
+ def run_python_code(self, code):
+ try:
+ # eval(expression, globals=None, locals=None)
+ output = eval(code, {"__builtins__": None}, {
+ # "PyHelper": self.PyHelper,
+ # "requests": requests,
+ "pitop": pitop,
+ })
+ except Exception as e:
+ output = str(e)
+ return output
+
+ def extension_message_handle(self, topic, payload):
+ logger.info(f'python code: {payload["content"]}')
+ python_code = payload["content"]
+ output = self.run_python_code(python_code)
+ try:
+ output = str(output) # 不要传递复杂结构
+ except Exception as e:
+ output = str(e)
+ payload["content"] = output
+ message = {"payload": payload}
+ self.publish(message)
+
+ def run(self):
+ "避免插件结束退出"
+ while self._running:
+ time.sleep(0.5)
+
+node = PythonKernelExtension()
+node.receive_loop_as_thread()
+node.run()
+```
+
+
+在树莓派里运行它。
+
+之后即可在 CodeLab Scratch 对pi-top编程。
+
+参考这个 [Demo](https://create.codelab.club/projects/12380/)
+
+
+
+
+## 参考
+* [API - pi-top Device](https://pi-top-pi-top-python-sdk.readthedocs-hosted.com/en/stable/api_pitop_device.html#pitop)
\ No newline at end of file
diff --git a/docs/extension_guide/pico.md b/docs/extension_guide/pico.md
new file mode 100644
index 0000000..583f020
--- /dev/null
+++ b/docs/extension_guide/pico.md
@@ -0,0 +1,9 @@
+# Pico
+
+
+# Demo
+
+
+
+
+[Hello RPI Pico](https://create.codelab.club/projects/9012/)
\ No newline at end of file
diff --git a/docs/extension_guide/posenet.md b/docs/extension_guide/posenet.md
index 28262f1..86630e2 100644
--- a/docs/extension_guide/posenet.md
+++ b/docs/extension_guide/posenet.md
@@ -1,2 +1,21 @@
# Tutorial
-hello world
\ No newline at end of file
+hello world
+
+# 进阶
+
+## PoseNet 精度测试(By 尚老师)
+
+### 0 摘要
+PoseNet作为姿态识别重要的模块之一(如图 1所示),在使用时会出现数据跳点,因此在使用时,会对部分操作产生影响。通过研究发现,提高数据精度的最有效想法之一,就是根据置信度对数据进行筛选。
+
+
+
+
+
+# FAQ
+
+## 数据抖动
+可以考虑加上置信度, 参考 [置信度demo](https://create.codelab.club/projects/9767/)
+
+## 左右颠倒
+开启摄像头试试
\ No newline at end of file
diff --git a/docs/extension_guide/readme.md b/docs/extension_guide/readme.md
new file mode 100644
index 0000000..e50537b
--- /dev/null
+++ b/docs/extension_guide/readme.md
@@ -0,0 +1,6 @@
+# 文档结构
+
+1. 基本介绍.
+2. hello world(第一步「连接」,引用英荔的工作)
+3. 积木说明
+4. 项目链接(参考Scratch wiki)
\ No newline at end of file
diff --git a/docs/extension_guide/robotic-arm.md b/docs/extension_guide/robotic-arm.md
new file mode 100644
index 0000000..64c38f5
--- /dev/null
+++ b/docs/extension_guide/robotic-arm.md
@@ -0,0 +1,110 @@
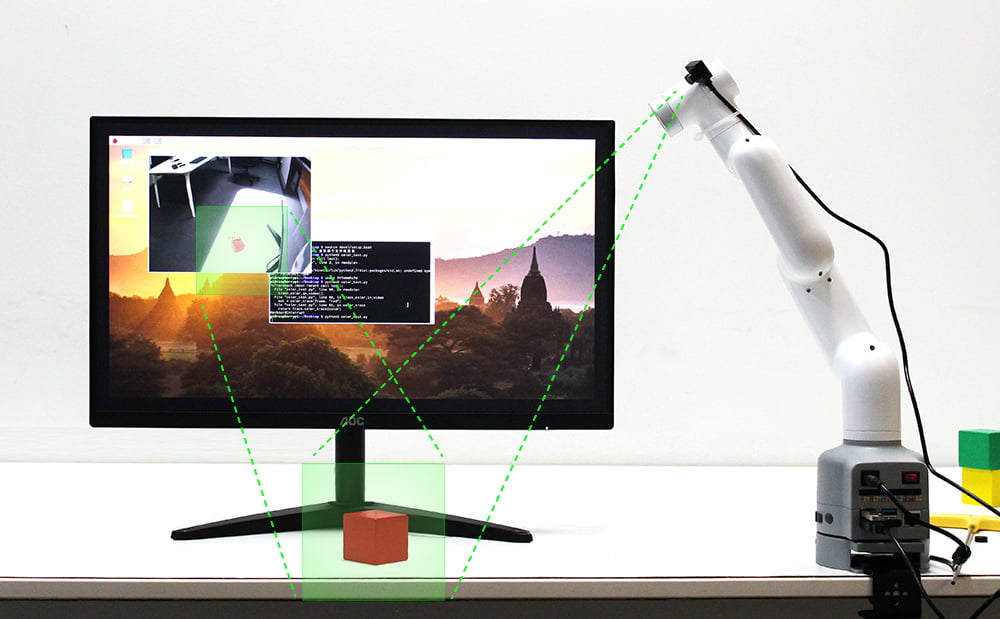
+# 小象机械臂
+
+## 介绍
+
+
+
+> 人人都可以学习玩耍的入门级协作机器人
+
+> myCobot的设计初衷是为了让对六自由度串联机械臂感兴趣的朋友,可以从0到1的了解、学习和操作机械臂,创造前所未有的机械臂使用体验与教学价值。
+
+---
+
+### 接管机械臂的思路
+
+由于小象机械臂内置了树莓派(用于驱动机械臂),我们将在树莓派里运行一个 [Adapter Node](https://adapter.codelab.club/dev_guide/Adapter-Node/),以便于用户可以在 CodeLab Scratch 中驱动机械臂。
+
+这个例子展示 Adapter Node 的一种典型用法: Adapter Node与Adapter可以不在同一个主机上。
+
+## hello world
+
+### 用户电脑配置
+假设用户使用自己的电脑编程(运行 Adapter 和 Scratch)
+
+在运行Adapter之前,设置[配置项](https://adapter.codelab.club/user_guide/settings/) `OPEN_MESSAGE_HUB = true`
+
+之后运行 CodeLab Adapter.
+
+### 树莓派配置
+在机械臂树莓派里安装 [codelab_adapter_client_python](https://github.com/CodeLabClub/codelab_adapter_client_python): `pip3 install codelab_adapter_client`
+
+创建 `node_mycobot.py` :
+
+```py
+import time
+from loguru import logger
+
+from pymycobot.mycobot import MyCobot
+from pymycobot.genre import Angle
+from pymycobot import PI_PORT, PI_BAUD # 当使用树莓派版本的mycobot时,可以引用这两个变量进行MyCobot初始化
+
+from codelab_adapter_client import AdapterNode
+
+# 初始化一个MyCobot对象
+mc = MyCobot(PI_PORT, PI_BAUD)
+
+class PythonKernelExtension(AdapterNode):
+
+ NODE_ID = "eim/mycobot"
+ HELP_URL = "http://adapter.codelab.club/"
+ WEIGHT = 95
+ VERSION = "0.1" # extension version
+ DESCRIPTION = "mycobot"
+
+ def __init__(self, **kwargs):
+ adapter_host = "192.168.31.164" # 运行Adapter的计算机IP
+ super().__init__(codelab_adapter_ip_address = adapter_host, **kwargs)
+ # self.PyHelper = PyHelper()
+
+ def run_python_code(self, code):
+ try:
+ # eval(expression, globals=None, locals=None)
+ output = eval(code, {"__builtins__": None}, {
+ # "PyHelper": self.PyHelper,
+ # "requests": requests,
+ "mc": mc,
+ "Angle": Angle
+ })
+ except Exception as e:
+ output = str(e)
+ return output
+
+ # @verify_token
+ def extension_message_handle(self, topic, payload):
+ logger.info(f'python code: {payload["content"]}')
+ python_code = payload["content"]
+ output = self.run_python_code(python_code)
+ try:
+ output = str(output) # 不要传递复杂结构
+ except Exception as e:
+ output = str(e)
+ payload["content"] = output
+ message = {"payload": payload}
+ self.publish(message)
+
+ def run(self):
+ "避免插件结束退出"
+ while self._running:
+ time.sleep(0.5)
+
+node = PythonKernelExtension()
+node.receive_loop_as_thread()
+node.run()
+```
+
+在树莓派里运行它。
+
+之后即可在 CodeLab Scratch 对机械臂编程。
+
+参考这个 [Demo](https://create.codelab.club/projects/12360/editor/)
+
+## 积木说明
+
+## 项目链接
+
+## FAQ
+
+
+## 参考
+* [mycobot-RPi](https://www.elephantrobotics.com/mycobot-RPi/)
+* [机械臂左右摆动](https://www.elephantrobotics.com/docs/myCobot/1-introduction/6-raspberry_mycobot/pymycobot/1-arm_swing.html)
\ No newline at end of file
diff --git a/docs/extension_guide/rpi_gpio.md b/docs/extension_guide/rpi_gpio.md
index b4c6251..e6a1461 100644
--- a/docs/extension_guide/rpi_gpio.md
+++ b/docs/extension_guide/rpi_gpio.md
@@ -35,12 +35,12 @@ Raspbian 默认已经预装 gpiozero 。
!!! 提醒
- 如果你手头没有LED, 你可以[使用命令行工具 gpio](https://blog.just4fun.site/post/iot/raspberrypi-install-and-config/#%E6%B5%8B%E8%AF%95%E5%B7%A5%E5%85%B7) ,观察引脚输出变化。
+ 如果你手头没有LED, 你可以[使用命令行工具 gpio](https://wwj718.github.io/post/iot/raspberrypi-install-and-config/#%E6%B5%8B%E8%AF%95%E5%B7%A5%E5%85%B7) ,观察引脚输出变化。
gpio用的mode是wPi,而gpiozero用的是BCM,所以pin17对应wpi的pin0

# 最后
-我们并不打算构建完备的积木组操控树莓派,树莓派高度灵活,难以完全积木化它的所有特性,那样不会提高可理解性。 我们希望用户灵活使用 Python 去增强 Scratch ,更好的扩展模式可以参考[Python eval kernel](https://adapter.codelab.club/extension_guide/extension_python_kernel/)。
+我们并不打算构建完备的积木组操控树莓派,树莓派高度灵活,难以完全积木化它的所有特性,那样不会提高可理解性。 我们希望用户灵活使用 Python 去增强 Scratch ,更好的扩展模式可以参考[Python eval kernel](/extension_guide/extension_python_kernel/)。
当然一些功能是可以积木化的,期待你来提交 PR。
@@ -49,5 +49,5 @@ Raspbian 默认已经预装 gpiozero 。
CodeLab Adapter的目标是**连接**。
# 参考
-- [gpio 测试工具](https://blog.just4fun.site/post/iot/raspberrypi-install-and-config/#%E6%B5%8B%E8%AF%95%E5%B7%A5%E5%85%B7)
+- [gpio 测试工具](https://wwj718.github.io/post/iot/raspberrypi-install-and-config/#%E6%B5%8B%E8%AF%95%E5%B7%A5%E5%85%B7)
- [wiringPi updated to 2.52 for the Raspberry Pi 4B](http://wiringpi.com/wiringpi-updated-to-2-52-for-the-raspberry-pi-4b/)
\ No newline at end of file
diff --git a/docs/extension_guide/simple_NLU.md b/docs/extension_guide/simple_NLU.md
index af430dd..d24cc8c 100644
--- a/docs/extension_guide/simple_NLU.md
+++ b/docs/extension_guide/simple_NLU.md
@@ -19,7 +19,7 @@ simple NLU 是一个简单的语义处理器,基于简单的规则匹配,可
## 插件说明
- 使用方式: 到[插件市场](/extension_guide/extension_market/)下载插件, 搜索 **NLU**
-- 插件类型: [Adapter Extension](https://adapter.codelab.club/dev_guide/helloworld/)
+- 插件类型: [Adapter Extension](/dev_guide/helloworld/)
- 插件源码: [extension_simple_NLU.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_simple_NLU.py)
## 依赖
@@ -32,7 +32,7 @@ simple NLU 是一个简单的语义处理器,基于简单的规则匹配,可
NLU 是一个语义解析器,语言文本的输入,是任意的。你可以使用 Scratch 内置的语音输入;也可以使用 Siri。
-如果你和视频 demo 一样,准备使用 Siri,需要先将 Siri 接入到 Adapter 中,参考[文档](https://adapter.codelab.club/extension_guide/siri/)。
+如果你和视频 demo 一样,准备使用 Siri,需要先将 Siri 接入到 Adapter 中,参考[文档](/extension_guide/siri/)。
## 步骤 1:打开 Codelab Adapter
diff --git a/docs/extension_guide/siri.md b/docs/extension_guide/siri.md
index 5e436e4..284de64 100644
--- a/docs/extension_guide/siri.md
+++ b/docs/extension_guide/siri.md
@@ -13,7 +13,7 @@ Hey siri
## 插件说明
- 使用方式: 到[插件市场](/extension_guide/extension_market/)下载插件, 搜索 **siri**
-- 插件类型: [Adapter Extension](https://adapter.codelab.club/dev_guide/helloworld/)
+- 插件类型: [Adapter Extension](/dev_guide/helloworld/)
- 插件源码: [extension_Siri.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_Siri.py)
## 依赖
@@ -64,4 +64,4 @@ Hey siri

# 原理说明
-* [CodeLab ❤ Siri](https://www.codelab.club/blog/codelab-like-siri/)
+* [CodeLab ❤ Siri](https://www-old.codelab.club/blog/codelab-like-siri/)
diff --git a/docs/extension_guide/sonicPi.md b/docs/extension_guide/sonicPi.md
index 82540a4..7d6780c 100644
--- a/docs/extension_guide/sonicPi.md
+++ b/docs/extension_guide/sonicPi.md
@@ -2,18 +2,19 @@

-# 插件说明
+## 介绍
-- 使用方式: 到[插件市场](/extension_guide/extension_market/)下载插件, 搜索 **sonicPi**
-- 插件类型: [Adapter Node](https://adapter.codelab.club/dev_guide/Adapter-Node/)
-- 插件源码: [node_sonicPi.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/nodes_v3/node_sonicPi.py)
-- 依赖库(python): `python -m pip install codelab_adapter_client python-sonic`
+Sonic Pi 是一个基于代码的音乐创作和表演工具。
-# 外部环境依赖
+拥有超过180万用户的多元社区。
+
+基于 Ruby 开发,最初设计用于支持学校的计算和音乐课程,由剑桥大学计算机实验室的 Sam Aaron 与树莓派基金会联合开发。可在主流操作系统中使用。
+
+### 外部环境依赖
需要下载[Sonic Pi](https://sonic-pi.net/)。
-# 开始使用
+## 开始使用
运行 Sonic Pi。
@@ -24,13 +25,33 @@
-# 进阶
+## 进阶
更多可用的指令,参考[python-sonic](https://github.com/gkvoelkl/python-sonic)。
如果你想深入了解[Sonic Pi](https://sonic-pi.net/),可以跟着 Sonic Pi 软件内置的文档学习。
-# 参考
+### 发送消息
+`>= 3.7.2` 的 Adapter 支持使用Scratch积木发送OSC消息,消息的参数(args)是一个 list(采用json语法,字符串使用 **双引号** )
+
+### Receiving OSC
+[Sonic Pi Receiving OSC](https://sonic-pi.net/tutorial.html#section-12-1)
+
+参考这个文档,你也可以基于[python-sonic](https://python-osc.readthedocs.io/en/latest/client.html#example)构建一个[自定义插件](/project_tutorial/eim_pt/#python)直接与Sonic Pi沟通。
+
+## FAQ
+
+### Linux用户
+Windows 和 Mac 用户开箱可用。Linux用户将自动安装依赖。
+
+Linux (Ubuntu 20.0)环境下安装完 Sonic Pi 后可能会出现程序无法启动的问题,这可能是因为 JACK 与 PulseAudio 在使用声卡上存在冲突造成的,参见 Sonic-Pi 仓库内这个 [issue 对该问题的讨论及最终的解决方法](https://github.com/sonic-pi-net/sonic-pi/issues/1025) 以及 [JACK 官方文档对相关问题的解释](https://jackaudio.org/faq/pulseaudio_and_jack.html)。具体的操作是:
+
+1. 在启动 Sonic-Pi 之前,先打开 QjackCtl(安装 Sonic-pi 时会自动安装),在 `Settings-Advanced`页面下,在 `Input Device` 中选择一个声卡,同时将 `Server Prefix` 修改为 `pasuspender -- /usr/bin/jackd`(我对此操作的理解是明确地为 JACK 选择一个声卡,同时暂停 PulseAudio 对它的可能占用。)
+2. 设置完成后保存,然后在控制页面上点击开始按钮,如果一切顺利终端内没有报错的话,这时再去运行 Sonic Pi 应该就会正常启动了。
+
+
+
+## 参考
- [Sonic Pi](https://sonic-pi.net/)
- [python-sonic](https://github.com/gkvoelkl/python-sonic)
diff --git a/docs/extension_guide/spheroRVR.md b/docs/extension_guide/spheroRVR.md
new file mode 100644
index 0000000..a96e5e7
--- /dev/null
+++ b/docs/extension_guide/spheroRVR.md
@@ -0,0 +1,58 @@
+# Sphero RVR
+
+
+!!! 提醒
+ 建议使用 APP 把固件升级到最新
+
+## 介绍
+RVR 是 Sphero 出品的一款教育机器人,内置多种传感器并支持丰富的硬件改装。此扩展可以实时控制通过蓝牙连接的 RVR。
+
+
+## Demo
+
+
+## 进阶
+### API
+使用 **广播** 积木调用 Python API: [Sphero Edu API](https://spherov2.readthedocs.io/en/latest/sphero_edu.html)
+
+## bug 记录
+只要 `import bleak` 就会出现这个问题.(lego mario也是)
+
+windows10 的某些版本([32bit 19041-SP0](https://item.m.jd.com/product/10026933866200.html?wxa_abtest=o&utm_source=iosapp&utm_medium=appshare&utm_campaign=t_335139774&utm_term=Wxfriends&ad_od=share&utm_user=plusmember&gx=RnFlx2ALOzTdndRJ-tE-G6S52g))认为该插件存在安全问题,导致adapter退出,参考
+
+* [How do I setup configuration when I use command line to build C#/.NET?
+](https://stackoverflow.com/questions/6469513/how-do-i-setup-configuration-when-i-use-command-line-to-build-c-net)
+* [loadFromRemoteSources](https://stackoverflow.com/questions/17615769/running-an-ironpython-script-from-python-sandbox-loadfromremotesources)
+
+造成bug的原因可能是依赖库造成的(因为调用系统蓝牙?)
+
+ps: 4.9.0 或许可用。
+
+
+
\ No newline at end of file
diff --git a/docs/extension_guide/stage.md b/docs/extension_guide/stage.md
index d53d2bb..a43fd8e 100644
--- a/docs/extension_guide/stage.md
+++ b/docs/extension_guide/stage.md
@@ -15,7 +15,7 @@ Adapter Stage 插件允许将舞台区的图像(舞台或者摄像头图像)
!!! 提醒
在 Adapter 3.2 之前,你需要自行从[插件市场](/extension_guide/extension_market/s)里下载 Stage 插件。 [源码地址](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_stage.py)
-运行 Stage 插件(当前插件的功能是把图像保存到 [Adapter Home 目录](https://adapter.codelab.club/user_guide/FAQ/#adapter)),你可以通过修改插件做其他事情。
+运行 Stage 插件(当前插件的功能是把图像保存到 [Adapter Home 目录](/user_guide/FAQ/#adapter)),你可以通过修改插件做其他事情。
如果你想使用 OpenCV 或 Tensorflow 处理图像,需要自定义[Adapter Node](/dev_guide/Adapter-Node/)
diff --git a/docs/extension_guide/sugar.md b/docs/extension_guide/sugar.md
new file mode 100644
index 0000000..4850849
--- /dev/null
+++ b/docs/extension_guide/sugar.md
@@ -0,0 +1,34 @@
+# Sugar
+
+
+
+构建 Sugar 插件的动机最初来自 @Lounsen 的想法: 接布尔量的 hat 积木。
+
+Sugar 插件是个实验室,试图为 Scratch 提供 **甜** 的语法糖。
+
+新的想法/需求,欢迎在[这个帖子](https://discuss.codelab.club/t/topic/169)下讨论
+
+# 积木介绍
+
+## 接布尔量的 hat 积木
+当情况**发生变化**,并且满足添加,才触发。类似 **当角色被点击** 积木。
+
+- [Demo](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/Scratch-when-true.sb3)
+
+
+
+上述例子,表达的是: 如果 **我的变量** 一直 **<** 50,只向前移动一次.
+
+使用hat积木我们可以构造出与 Scratch 原生事件积木类似的东西:
+
+
+
+### 与linda积木配合使用
+
+
+hat 积木中只应包含 Scratch 原生积木,最好不要放入扩展积木。
+
+可能引起异常的原因还在进一步调查中。
+
+## Color积木
+参考 [Computer Colors](https://en.scratch-wiki.info/wiki/Computer_Colors)
\ No newline at end of file
diff --git a/docs/extension_guide/switch.md b/docs/extension_guide/switch.md
new file mode 100644
index 0000000..e002e6e
--- /dev/null
+++ b/docs/extension_guide/switch.md
@@ -0,0 +1,7 @@
+# Switch
+
+我们之前的演示案例是利用 Toy-Con Garage 做的。
+
+任天堂没有开放接口。
+
+我们通过捕获 Toy-Con Garage 的视觉输出做的连接。
\ No newline at end of file
diff --git a/docs/extension_guide/teachable_machine.md b/docs/extension_guide/teachable_machine.md
index 707a12d..2dcddbe 100644
--- a/docs/extension_guide/teachable_machine.md
+++ b/docs/extension_guide/teachable_machine.md
@@ -2,29 +2,29 @@
## 介绍
-[CodeLab Adapter 接入 Teachable Machine](https://www.codelab.club/blog/adapter-teachable-machine/)
-
-## 依赖
+[CodeLab Adapter 接入 Teachable Machine](https://www-old.codelab.club/blog/adapter-teachable-machine/)
{!utils/dependence.md!}
-安装 Chrome 浏览器插件:[Tampermonkey](https://chrome.google.com/webstore/detail/tampermonkey/dhdgffkkebhmkfjojejmpbldmpobfkfo)。
-点击安装 Tampermonkey 脚本 [Teachablemachine_Result.user.js](https://gist.github.com/wwj718/78402d0de9efb8d33742c8770056489c/raw/4e1373c3ce0d1c86af93310b42321251bee567b3/Teachablemachine_Result_fixed.user.js)。
+## hello world
+
+### 打开 Teachable Machine
-## 步骤 1:打开 Codelab Adapter
+Longan团队已经将Teachable Machine部署到国内: [Longan Teachable Machine](https://train.longan.link/), 并且内置支持CodeLab Adapter, 开箱可用!
-{!utils/open_adapter.md!}
+!!! 提醒
+ 海外用户参考文末操作
-## 步骤 2:打开 [Teachable Machine](https://teachablemachine.withgoogle.com/train)
+
-完成上述工作后,打开 [Teachable Machine](https://teachablemachine.withgoogle.com/train),页面应该会弹出提示:`connected!`,表示已经将 Teachable Machine 接入 CodeLab Adapter。
+表示已经将 Teachable Machine 接入 CodeLab Adapter 了。
接下来,可以开始你的 Teachable Machine 之旅途。 我们来展示一个例子。

-## 步骤 3:打开 [Codelab Scratch3](https://scratch-beta.codelab.club/)
+### 打开 [Codelab Scratch3](https://scratch-beta.codelab.club/)
{!utils/open_scratch.md!}
@@ -40,4 +40,19 @@
!!! 提醒
Teachable Machine 的网页不能在后台运行,需要和 Scratch 一起并列在桌面上,否则程序不会运行。
+## 积木说明
+暂无
+
+## 项目链接
+暂无
+
+## FAQ
+### 海外用户如何使用
+
+如果你是海外用户,建议使用 [Google 官方的 teachablemachine](https://teachablemachine.withgoogle.com/), 你需要搭配以下插件。
+
+安装 Chrome 浏览器插件:[Tampermonkey](https://chrome.google.com/webstore/detail/tampermonkey/dhdgffkkebhmkfjojejmpbldmpobfkfo)。
+
+点击安装 Tampermonkey 脚本 [Teachablemachine_Result.user.js](https://gist.githubusercontent.com/wwj718/78402d0de9efb8d33742c8770056489c/raw/2b99784ff8cf0d344e86e8c2b781b0babfc84c33/Teachablemachine_Result_fixed.user.js)。
+运行Adapter之后如何页面弹出,已连接Adapter,则说明一切正常
\ No newline at end of file
diff --git a/docs/extension_guide/tello.md b/docs/extension_guide/tello.md
index 1f8c983..baa7b33 100644
--- a/docs/extension_guide/tello.md
+++ b/docs/extension_guide/tello.md
@@ -1,5 +1,8 @@
# DJI Tello
+!!! tello
+ 请使用 [tello2.0](/extension_guide/tello/)
+
@@ -11,6 +14,7 @@
以下是在线版使用教程,离线版基本相似。
+
### 步骤 1:打开 [CodeLab Scratch](https://scratch-beta.codelab.club?adapter_host=127.0.0.1)
运行CodeLab Adapter, 确保在线平台与Adapte连接正常。
@@ -21,7 +25,7 @@

@@ -61,3 +65,21 @@
## DJI Tello x Switch Joy-Con
+
+# 改进
+目前 Tello 的插件都已开源,很久没更新,稳定性不高,大家可以一起改进它
+
+* [extension_tello](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_tello.py)
+* [scratch3_tello](https://github.com/CodeLabClub/scratch3_tello)
+
+!!! 提醒
+ 如果你希望做一些更复杂的事,建议直接使用社区里的 Python SDK与 设备交互,之后使用 [Adapter Node](/dev_guide/Adapter-Node/) 将其接入Adapter环境中。
+
+## Tello api 文档
+* [SDK 2.0](https://dl-cdn.ryzerobotics.com/downloads/Tello/Tello%20SDK%202.0%20User%20Guide.pdf)
+* [DJITelloPy](https://github.com/damiafuentes/DJITelloPy)
+
+* [multi_robot_drone_example](https://robomaster-dev.readthedocs.io/zh_CN/latest/python_sdk/multi_robot_drone_example.html)
\ No newline at end of file
diff --git a/docs/extension_guide/tello2.md b/docs/extension_guide/tello2.md
new file mode 100644
index 0000000..5994b04
--- /dev/null
+++ b/docs/extension_guide/tello2.md
@@ -0,0 +1,86 @@
+# Tello 2.0
+
+Tello 插件的 2.0 版本, 基于[DJITelloPy](https://github.com/damiafuentes/DJITelloPy)库。
+
+支持Tello、Tello Edu 和 Tello TT。
+
+!!! 提醒
+ Tello 会占用 wifi,导致电脑无法联网,请使用 CodeLab Adapter 的离线模式: [FAQ:离线使用](/user_guide/FAQ/#_6) (在`>=3.4.0`的版本中可用)。
+ 更好的方式可能是将Tello接入路由器上,或者使用USB无线网卡,避免电脑无法上网。
+
+以下是在线版使用教程,离线版基本相似。
+
+
+### 步骤 1:打开 [CodeLab Scratch](https://scratch-beta.codelab.club)
+运行CodeLab Adapter, 确保在线平台与Adapte连接正常。
+
+看到 [CodeLab Scratch](https://scratch-beta.codelab.club) 指示灯显示绿色,代表连接成功。
+
+
+
+
+
+### 步骤 2:连接 Tello
+
+将电脑连上 Tello 的 wifi 热点。(操作细节可以参考 Tello 说明书)
+
+### 步骤 3:开始使用
+
+选择 scratch3 中的 Tello2.0 插件.
+
+
+
+
+Unipad 提供多种游戏手柄界面,这些可以很好地跟Scratch项目结合! OSC 如此高的刷新率,几乎没有任何延迟
+
+### 有什么推荐的兼容 OSC 的软件
+
+* 音乐: [SonicPi](/extension_guide/sonicPi/)
+* AI:[Wekinator](http://www.wekinator.org/)
+* blender/unity
\ No newline at end of file
diff --git a/docs/extension_guide/overdrive.md b/docs/extension_guide/overdrive.md
new file mode 100644
index 0000000..76831b3
--- /dev/null
+++ b/docs/extension_guide/overdrive.md
@@ -0,0 +1,48 @@
+# Overdrive
+
+## 介绍
+
+
+> 与你的朋友或人工智能来一场速度与激情的较量。
+
+Overdrive 是一款可编程赛车,内置多种传感器,在特制的跑道上运行时能定位到自身的位置。此扩展可以实时控制通过蓝牙连接的赛车。
+
+## hello world
+打开 Scratch overdrive 插件。
+
+使用连接图标,连接小车。
+
+跑起来:
+
+
+
+## 积木说明
+暂无
+
+## 项目链接
+### Demo 1: microbit 无线油门
+
+
+
+
+[microbit-overdrive](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/microbit-overdrive.sb3)
+
+
+### Demo 2
+
+
+
+
+
+[overdrive-demo](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/overdrive-demo.sb3)
+
+## FAQ
+### PRO_KEY是什么?如何获取?
+PRO_KEY 是 CodeLab 尝试服务合作伙伴和企业用户的高级特性。
+
+使用 PRO_KEY 可以启用 Adapter 的高级特性: 激光雷达、overdrive...
+
+欢迎发送邮件咨询/合作/购买: `wuwenjie@codelab.club`
+
+### [overdrive 居中运行](https://create.codelab.club/projects/10388/) 有时会一直摇摆
+是的,造成这个问题的原因是,小车有时报告的offset信息不准确,目前认为是固件问题,暂无办法。
\ No newline at end of file
diff --git a/docs/extension_guide/overdrive2.md b/docs/extension_guide/overdrive2.md
new file mode 100644
index 0000000..1b5fab6
--- /dev/null
+++ b/docs/extension_guide/overdrive2.md
@@ -0,0 +1,2 @@
+# overdrive
+参考[overdrive](https://adapter.codelab.club/extension_guide/overdrive/)
\ No newline at end of file
diff --git a/docs/extension_guide/physical_blocks.md b/docs/extension_guide/physical_blocks.md
index dab09c6..f718586 100644
--- a/docs/extension_guide/physical_blocks.md
+++ b/docs/extension_guide/physical_blocks.md
@@ -18,36 +18,24 @@ physical blocks 在软件层面是一个 CodeLab Adapter插件,由于 CodeLab
* 运行程序!
-->
+!!! 提醒
+ 建议使用2.0版本: [physical blocks 2.0](/extension_guide/physical_blocks2/)。 不久将弃用1.0版本。
+
使用 physical blocks,可以在一张桌子上对实物进行编程。
+Windows 和 Mac 用户开箱可用。 Linux需要安装依赖(参考文末)
+
+建议以[入门案例](#_3)为模版。
+
参考:
- [CodeLab DynamicTable: A Seeing World](https://www-old.codelab.club/blog/codelab-dynamictable-a-seeing-world/)
- [CodeLab DynamicTable: 一个可实施的技术方案](https://www-old.codelab.club/blog/codelab-dynamictable-an-instance/)
-## 提醒
-
-第一次运行插件,Windows 和 Mac 用户会自行按照依赖: `opencv-contrib-python`, 依赖比较大(`> 60MB`), 耐心等待 1 分钟左右,安装完成会会弹出通知。
-
-Linux 用户需要手动安装 `opencv-contrib-python`(有系统依赖)。
-
-### 树莓派用户
-
-安装依赖系统
-
-```bash
-sudo apt-get install libjpeg-dev libtiff5-dev libjasper-dev libpng12-dev
-sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev
-sudo apt-get install libxvidcore-dev libx264-dev
-sudo apt install libatlas-base-dev
-sudo apt-get install qt4-dev-tools
-sudo apt-get install libhdf5-dev libhdf5-serial-dev libhdf5-103
-```
-
-之后安装`opencv-contrib-python`
-
-- `pip3 install opencv-contrib-python==3.4.6.27`
+## 积木介绍
+
+可以从 [arucogen](https://chev.me/arucogen/) 查询 ArUco marker id
## Demo
@@ -65,7 +53,7 @@ sudo apt-get install libhdf5-dev libhdf5-serial-dev libhdf5-103
- [Scratch-spell-demo.sb3](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/Scratch-spell-demo.sb3){target=\_blank} : 获取 marker id 列表(从左到右,从上到下)
## 更多案例
-* [第一期的直播演示项目](https://www.codelab.club/blog/the-first-live-showcase-projects-code/)
+* [第一期的直播演示项目](https://www-old.codelab.club/blog/the-first-live-showcase-projects-code/)
* [智能家居展厅](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/Scratch-spelling-iot-show.sb3)
# FAQ
@@ -73,7 +61,7 @@ sudo apt-get install libhdf5-dev libhdf5-serial-dev libhdf5-103
### 如何打印 Marker
我们提供了一份30张的版本:
-
+
你可以从 [arucogen](https://chev.me/arucogen/) 里打印(建议从编号1开始)
@@ -89,4 +77,25 @@ sudo apt-get install libhdf5-dev libhdf5-serial-dev libhdf5-103
aruco_dict = cv2.aruco.Dictionary_get(cv2.aruco.DICT_4X4_100)
```
-关于不同的marker数量决定了字典的大小,越小的数字,鲁棒性越好。 考虑到大多数用户的场景,50个是够用的,所以我们默认采用50.
\ No newline at end of file
+关于不同的marker数量决定了字典的大小,越小的数字,鲁棒性越好。 考虑到大多数用户的场景,50个是够用的,所以我们默认采用50.
+
+### Linux 用户
+
+Linux 用户需要手动安装 `opencv-contrib-python`(有系统依赖)。
+
+#### 树莓派用户
+
+安装依赖系统
+
+```bash
+sudo apt-get install libjpeg-dev libtiff5-dev libjasper-dev libpng12-dev
+sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev
+sudo apt-get install libxvidcore-dev libx264-dev
+sudo apt install libatlas-base-dev
+sudo apt-get install qt4-dev-tools
+sudo apt-get install libhdf5-dev libhdf5-serial-dev libhdf5-103
+```
+
+之后安装`opencv-contrib-python`
+
+- `pip3 install opencv-contrib-python==3.4.6.27`
diff --git a/docs/extension_guide/physical_blocks2.md b/docs/extension_guide/physical_blocks2.md
new file mode 100644
index 0000000..b3aae75
--- /dev/null
+++ b/docs/extension_guide/physical_blocks2.md
@@ -0,0 +1,106 @@
+# Tutorial
+
+## 介绍
+physical blocks 2.0,新的更新我们都将在这个版本是进行,[physical blocks 1.0](/extension_guide/physical_blocks/)在未来将弃用。
+
+使用 physical blocks,可以在一张桌子上对实物进行编程。
+
+Windows 和 Mac 用户开箱可用。 Linux需要安装依赖(参考文末)
+
+!!! 提醒
+ CodeLab Adapter版本 `>= 3.7.3`
+
+参考:
+
+- [CodeLab DynamicTable: A Seeing World](https://www-old.codelab.club/blog/codelab-dynamictable-a-seeing-world/)
+- [CodeLab DynamicTable: 一个可实施的技术方案](https://www-old.codelab.club/blog/codelab-dynamictable-an-instance/)
+
+## 积木介绍
+
+
+
+可以从 [arucogen](https://chev.me/arucogen/) 查询 ArUco marker id
+
+## Demo
+
+
+
+
+
+
+
+## 入门案例
+
+分享两个入门案例:
+
+- [physical-blocks2-angle-demo](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/physical-blocks2-angle-demo.sb3){target=\_blank} : 获取 marker 旋转角
+- [physical-blocks2-spell-demo](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/physical-blocks2-spell-demo.sb3){target=\_blank} : 获取 marker id 列表(从左到右,从上到下)
+
+## 更多案例
+* [第一期的直播演示项目](https://www-old.codelab.club/blog/the-first-live-showcase-projects-code/)
+* [智能家居展厅](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/Scratch-spelling-iot-show.sb3)
+
+# FAQ
+
+### 刷新率/FPS
+在 MacOS(2.3 GHz Intel Core i5)下,大约达到10帧的刷新率
+
+目前尚未发布的 Pro 版本大约是 20 帧的刷新率
+
+可使用以下技巧观察刷新率:
+
+
+
+### 与1.0版本的区别?
+标记列表默认是字符串(序列化之后),可以随意与scrath积木组合(诸如`xx包含xx`积木),避免因为操作list引起的崩溃(诸如将list保存为变量)。
+
+在2.0中,直到主动使用JSON parse积木解析后,它才称为列表。相关操作参考:[json积木](/extension_guide/json/),也可参考前边的例子: [physical-blocks2-spell-demo](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/physical-blocks2-spell-demo.sb3){target=\_blank}
+
+此外2.0 只使用一个积木更新数据,提高标签存在的稳定性(也提高速度),其中一种典型的编程模式是: 在一次更新数据之后的积木都对应更新瞬间的视野状态。而不像1.0,每个积木都有各自瞬间的视野。
+
+### 如何打印 Marker
+我们提供了一份30张的版本:
+
+
+
+你可以从 [arucogen](https://chev.me/arucogen/) 里打印(建议从编号1开始)
+
+更多细节参考[CodeLab DynamicTable: 一个可实施的技术方案](https://www-old.codelab.club/blog/codelab-dynamictable-an-instance/)
+
+### 默认的Marker支持250种不同类型(marker id)
+默认是`4X4_250`(最多250种)的marker, 你可以选择:
+
+* `4x4_50`(最多50种)
+* `4x4_250`(最多250种)
+* `4x4_100`(最多100种)
+* `4x4_1000`(最多1000种)
+
+选择之后请修改(推荐使用[JupyterLab](/extension_guide/jupyterlab/))插件里对应的代码(104行):
+
+```python
+# aruco_dict = cv2.aruco.Dictionary_get(cv2.aruco.DICT_4X4_250)
+aruco_dict = cv2.aruco.Dictionary_get(cv2.aruco.DICT_4X4_1000)
+```
+
+关于不同的marker数量决定了字典的大小,越小的数字,鲁棒性越好。
+
+### Linux 用户
+
+Linux 用户需要手动安装 `opencv-contrib-python`(有系统依赖)。
+
+#### 树莓派用户
+
+安装依赖系统
+
+```bash
+sudo apt-get install libjpeg-dev libtiff5-dev libjasper-dev libpng12-dev
+sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev
+sudo apt-get install libxvidcore-dev libx264-dev
+sudo apt install libatlas-base-dev
+sudo apt-get install qt4-dev-tools
+sudo apt-get install libhdf5-dev libhdf5-serial-dev libhdf5-103
+```
+
+之后安装`opencv-contrib-python`
+
+- `pip3 install opencv-contrib-python==3.4.6.27`
diff --git a/docs/extension_guide/pi-top.md b/docs/extension_guide/pi-top.md
new file mode 100644
index 0000000..306d5ff
--- /dev/null
+++ b/docs/extension_guide/pi-top.md
@@ -0,0 +1,102 @@
+# pi-top
+
+# 介绍
+
+
+
+## 接管 pi-top 的思路
+
+参考[机械臂](https://adapter.codelab.club/extension_guide/robotic-arm/),因其都是树莓派。
+
+
+## hello world
+
+### 用户电脑配置
+
+假设用户使用自己的电脑编程(运行 Adapter 和 Scratch)
+
+在运行Adapter之前,设置[配置项](https://adapter.codelab.club/user_guide/settings/) `OPEN_MESSAGE_HUB = true`
+
+之后运行 CodeLab Adapter.
+
+### 树莓派配置
+
+在机械臂树莓派里安装 [codelab_adapter_client_python](https://github.com/CodeLabClub/codelab_adapter_client_python): `pip3 install codelab_adapter_client`
+
+创建 `node_PiTop.py` :
+
+```py
+# fork 自: https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_python.py
+import time
+from loguru import logger
+
+from codelab_adapter_client import AdapterNode
+
+from pitop import Pitop
+
+
+# Set up pi-top
+pitop = Pitop()
+
+# Say hi!
+# pitop.miniscreen.display_text("Hello!")
+
+class PythonKernelExtension(AdapterNode):
+
+ NODE_ID = "eim/PiTop"
+ HELP_URL = "http://adapter.codelab.club/"
+ WEIGHT = 95
+ VERSION = "0.1" # extension version
+ DESCRIPTION = "PiTop"
+
+ def __init__(self, **kwargs):
+ adapter_host = "192.168.31.164" # 运行Adapter的计算机IP
+ super().__init__(codelab_adapter_ip_address = adapter_host, **kwargs)
+ # self.PyHelper = PyHelper()
+
+ def run_python_code(self, code):
+ try:
+ # eval(expression, globals=None, locals=None)
+ output = eval(code, {"__builtins__": None}, {
+ # "PyHelper": self.PyHelper,
+ # "requests": requests,
+ "pitop": pitop,
+ })
+ except Exception as e:
+ output = str(e)
+ return output
+
+ def extension_message_handle(self, topic, payload):
+ logger.info(f'python code: {payload["content"]}')
+ python_code = payload["content"]
+ output = self.run_python_code(python_code)
+ try:
+ output = str(output) # 不要传递复杂结构
+ except Exception as e:
+ output = str(e)
+ payload["content"] = output
+ message = {"payload": payload}
+ self.publish(message)
+
+ def run(self):
+ "避免插件结束退出"
+ while self._running:
+ time.sleep(0.5)
+
+node = PythonKernelExtension()
+node.receive_loop_as_thread()
+node.run()
+```
+
+
+在树莓派里运行它。
+
+之后即可在 CodeLab Scratch 对pi-top编程。
+
+参考这个 [Demo](https://create.codelab.club/projects/12380/)
+
+
+
+
+## 参考
+* [API - pi-top Device](https://pi-top-pi-top-python-sdk.readthedocs-hosted.com/en/stable/api_pitop_device.html#pitop)
\ No newline at end of file
diff --git a/docs/extension_guide/pico.md b/docs/extension_guide/pico.md
new file mode 100644
index 0000000..583f020
--- /dev/null
+++ b/docs/extension_guide/pico.md
@@ -0,0 +1,9 @@
+# Pico
+
+
+# Demo
+
+
+
+
+[Hello RPI Pico](https://create.codelab.club/projects/9012/)
\ No newline at end of file
diff --git a/docs/extension_guide/posenet.md b/docs/extension_guide/posenet.md
index 28262f1..86630e2 100644
--- a/docs/extension_guide/posenet.md
+++ b/docs/extension_guide/posenet.md
@@ -1,2 +1,21 @@
# Tutorial
-hello world
\ No newline at end of file
+hello world
+
+# 进阶
+
+## PoseNet 精度测试(By 尚老师)
+
+### 0 摘要
+PoseNet作为姿态识别重要的模块之一(如图 1所示),在使用时会出现数据跳点,因此在使用时,会对部分操作产生影响。通过研究发现,提高数据精度的最有效想法之一,就是根据置信度对数据进行筛选。
+
+
+
+
+
+# FAQ
+
+## 数据抖动
+可以考虑加上置信度, 参考 [置信度demo](https://create.codelab.club/projects/9767/)
+
+## 左右颠倒
+开启摄像头试试
\ No newline at end of file
diff --git a/docs/extension_guide/readme.md b/docs/extension_guide/readme.md
new file mode 100644
index 0000000..e50537b
--- /dev/null
+++ b/docs/extension_guide/readme.md
@@ -0,0 +1,6 @@
+# 文档结构
+
+1. 基本介绍.
+2. hello world(第一步「连接」,引用英荔的工作)
+3. 积木说明
+4. 项目链接(参考Scratch wiki)
\ No newline at end of file
diff --git a/docs/extension_guide/robotic-arm.md b/docs/extension_guide/robotic-arm.md
new file mode 100644
index 0000000..64c38f5
--- /dev/null
+++ b/docs/extension_guide/robotic-arm.md
@@ -0,0 +1,110 @@
+# 小象机械臂
+
+## 介绍
+
+
+
+> 人人都可以学习玩耍的入门级协作机器人
+
+> myCobot的设计初衷是为了让对六自由度串联机械臂感兴趣的朋友,可以从0到1的了解、学习和操作机械臂,创造前所未有的机械臂使用体验与教学价值。
+
+---
+
+### 接管机械臂的思路
+
+由于小象机械臂内置了树莓派(用于驱动机械臂),我们将在树莓派里运行一个 [Adapter Node](https://adapter.codelab.club/dev_guide/Adapter-Node/),以便于用户可以在 CodeLab Scratch 中驱动机械臂。
+
+这个例子展示 Adapter Node 的一种典型用法: Adapter Node与Adapter可以不在同一个主机上。
+
+## hello world
+
+### 用户电脑配置
+假设用户使用自己的电脑编程(运行 Adapter 和 Scratch)
+
+在运行Adapter之前,设置[配置项](https://adapter.codelab.club/user_guide/settings/) `OPEN_MESSAGE_HUB = true`
+
+之后运行 CodeLab Adapter.
+
+### 树莓派配置
+在机械臂树莓派里安装 [codelab_adapter_client_python](https://github.com/CodeLabClub/codelab_adapter_client_python): `pip3 install codelab_adapter_client`
+
+创建 `node_mycobot.py` :
+
+```py
+import time
+from loguru import logger
+
+from pymycobot.mycobot import MyCobot
+from pymycobot.genre import Angle
+from pymycobot import PI_PORT, PI_BAUD # 当使用树莓派版本的mycobot时,可以引用这两个变量进行MyCobot初始化
+
+from codelab_adapter_client import AdapterNode
+
+# 初始化一个MyCobot对象
+mc = MyCobot(PI_PORT, PI_BAUD)
+
+class PythonKernelExtension(AdapterNode):
+
+ NODE_ID = "eim/mycobot"
+ HELP_URL = "http://adapter.codelab.club/"
+ WEIGHT = 95
+ VERSION = "0.1" # extension version
+ DESCRIPTION = "mycobot"
+
+ def __init__(self, **kwargs):
+ adapter_host = "192.168.31.164" # 运行Adapter的计算机IP
+ super().__init__(codelab_adapter_ip_address = adapter_host, **kwargs)
+ # self.PyHelper = PyHelper()
+
+ def run_python_code(self, code):
+ try:
+ # eval(expression, globals=None, locals=None)
+ output = eval(code, {"__builtins__": None}, {
+ # "PyHelper": self.PyHelper,
+ # "requests": requests,
+ "mc": mc,
+ "Angle": Angle
+ })
+ except Exception as e:
+ output = str(e)
+ return output
+
+ # @verify_token
+ def extension_message_handle(self, topic, payload):
+ logger.info(f'python code: {payload["content"]}')
+ python_code = payload["content"]
+ output = self.run_python_code(python_code)
+ try:
+ output = str(output) # 不要传递复杂结构
+ except Exception as e:
+ output = str(e)
+ payload["content"] = output
+ message = {"payload": payload}
+ self.publish(message)
+
+ def run(self):
+ "避免插件结束退出"
+ while self._running:
+ time.sleep(0.5)
+
+node = PythonKernelExtension()
+node.receive_loop_as_thread()
+node.run()
+```
+
+在树莓派里运行它。
+
+之后即可在 CodeLab Scratch 对机械臂编程。
+
+参考这个 [Demo](https://create.codelab.club/projects/12360/editor/)
+
+## 积木说明
+
+## 项目链接
+
+## FAQ
+
+
+## 参考
+* [mycobot-RPi](https://www.elephantrobotics.com/mycobot-RPi/)
+* [机械臂左右摆动](https://www.elephantrobotics.com/docs/myCobot/1-introduction/6-raspberry_mycobot/pymycobot/1-arm_swing.html)
\ No newline at end of file
diff --git a/docs/extension_guide/rpi_gpio.md b/docs/extension_guide/rpi_gpio.md
index b4c6251..e6a1461 100644
--- a/docs/extension_guide/rpi_gpio.md
+++ b/docs/extension_guide/rpi_gpio.md
@@ -35,12 +35,12 @@ Raspbian 默认已经预装 gpiozero 。
!!! 提醒
- 如果你手头没有LED, 你可以[使用命令行工具 gpio](https://blog.just4fun.site/post/iot/raspberrypi-install-and-config/#%E6%B5%8B%E8%AF%95%E5%B7%A5%E5%85%B7) ,观察引脚输出变化。
+ 如果你手头没有LED, 你可以[使用命令行工具 gpio](https://wwj718.github.io/post/iot/raspberrypi-install-and-config/#%E6%B5%8B%E8%AF%95%E5%B7%A5%E5%85%B7) ,观察引脚输出变化。
gpio用的mode是wPi,而gpiozero用的是BCM,所以pin17对应wpi的pin0

# 最后
-我们并不打算构建完备的积木组操控树莓派,树莓派高度灵活,难以完全积木化它的所有特性,那样不会提高可理解性。 我们希望用户灵活使用 Python 去增强 Scratch ,更好的扩展模式可以参考[Python eval kernel](https://adapter.codelab.club/extension_guide/extension_python_kernel/)。
+我们并不打算构建完备的积木组操控树莓派,树莓派高度灵活,难以完全积木化它的所有特性,那样不会提高可理解性。 我们希望用户灵活使用 Python 去增强 Scratch ,更好的扩展模式可以参考[Python eval kernel](/extension_guide/extension_python_kernel/)。
当然一些功能是可以积木化的,期待你来提交 PR。
@@ -49,5 +49,5 @@ Raspbian 默认已经预装 gpiozero 。
CodeLab Adapter的目标是**连接**。
# 参考
-- [gpio 测试工具](https://blog.just4fun.site/post/iot/raspberrypi-install-and-config/#%E6%B5%8B%E8%AF%95%E5%B7%A5%E5%85%B7)
+- [gpio 测试工具](https://wwj718.github.io/post/iot/raspberrypi-install-and-config/#%E6%B5%8B%E8%AF%95%E5%B7%A5%E5%85%B7)
- [wiringPi updated to 2.52 for the Raspberry Pi 4B](http://wiringpi.com/wiringpi-updated-to-2-52-for-the-raspberry-pi-4b/)
\ No newline at end of file
diff --git a/docs/extension_guide/simple_NLU.md b/docs/extension_guide/simple_NLU.md
index af430dd..d24cc8c 100644
--- a/docs/extension_guide/simple_NLU.md
+++ b/docs/extension_guide/simple_NLU.md
@@ -19,7 +19,7 @@ simple NLU 是一个简单的语义处理器,基于简单的规则匹配,可
## 插件说明
- 使用方式: 到[插件市场](/extension_guide/extension_market/)下载插件, 搜索 **NLU**
-- 插件类型: [Adapter Extension](https://adapter.codelab.club/dev_guide/helloworld/)
+- 插件类型: [Adapter Extension](/dev_guide/helloworld/)
- 插件源码: [extension_simple_NLU.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_simple_NLU.py)
## 依赖
@@ -32,7 +32,7 @@ simple NLU 是一个简单的语义处理器,基于简单的规则匹配,可
NLU 是一个语义解析器,语言文本的输入,是任意的。你可以使用 Scratch 内置的语音输入;也可以使用 Siri。
-如果你和视频 demo 一样,准备使用 Siri,需要先将 Siri 接入到 Adapter 中,参考[文档](https://adapter.codelab.club/extension_guide/siri/)。
+如果你和视频 demo 一样,准备使用 Siri,需要先将 Siri 接入到 Adapter 中,参考[文档](/extension_guide/siri/)。
## 步骤 1:打开 Codelab Adapter
diff --git a/docs/extension_guide/siri.md b/docs/extension_guide/siri.md
index 5e436e4..284de64 100644
--- a/docs/extension_guide/siri.md
+++ b/docs/extension_guide/siri.md
@@ -13,7 +13,7 @@ Hey siri
## 插件说明
- 使用方式: 到[插件市场](/extension_guide/extension_market/)下载插件, 搜索 **siri**
-- 插件类型: [Adapter Extension](https://adapter.codelab.club/dev_guide/helloworld/)
+- 插件类型: [Adapter Extension](/dev_guide/helloworld/)
- 插件源码: [extension_Siri.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_Siri.py)
## 依赖
@@ -64,4 +64,4 @@ Hey siri

# 原理说明
-* [CodeLab ❤ Siri](https://www.codelab.club/blog/codelab-like-siri/)
+* [CodeLab ❤ Siri](https://www-old.codelab.club/blog/codelab-like-siri/)
diff --git a/docs/extension_guide/sonicPi.md b/docs/extension_guide/sonicPi.md
index 82540a4..7d6780c 100644
--- a/docs/extension_guide/sonicPi.md
+++ b/docs/extension_guide/sonicPi.md
@@ -2,18 +2,19 @@

-# 插件说明
+## 介绍
-- 使用方式: 到[插件市场](/extension_guide/extension_market/)下载插件, 搜索 **sonicPi**
-- 插件类型: [Adapter Node](https://adapter.codelab.club/dev_guide/Adapter-Node/)
-- 插件源码: [node_sonicPi.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/nodes_v3/node_sonicPi.py)
-- 依赖库(python): `python -m pip install codelab_adapter_client python-sonic`
+Sonic Pi 是一个基于代码的音乐创作和表演工具。
-# 外部环境依赖
+拥有超过180万用户的多元社区。
+
+基于 Ruby 开发,最初设计用于支持学校的计算和音乐课程,由剑桥大学计算机实验室的 Sam Aaron 与树莓派基金会联合开发。可在主流操作系统中使用。
+
+### 外部环境依赖
需要下载[Sonic Pi](https://sonic-pi.net/)。
-# 开始使用
+## 开始使用
运行 Sonic Pi。
@@ -24,13 +25,33 @@
-# 进阶
+## 进阶
更多可用的指令,参考[python-sonic](https://github.com/gkvoelkl/python-sonic)。
如果你想深入了解[Sonic Pi](https://sonic-pi.net/),可以跟着 Sonic Pi 软件内置的文档学习。
-# 参考
+### 发送消息
+`>= 3.7.2` 的 Adapter 支持使用Scratch积木发送OSC消息,消息的参数(args)是一个 list(采用json语法,字符串使用 **双引号** )
+
+### Receiving OSC
+[Sonic Pi Receiving OSC](https://sonic-pi.net/tutorial.html#section-12-1)
+
+参考这个文档,你也可以基于[python-sonic](https://python-osc.readthedocs.io/en/latest/client.html#example)构建一个[自定义插件](/project_tutorial/eim_pt/#python)直接与Sonic Pi沟通。
+
+## FAQ
+
+### Linux用户
+Windows 和 Mac 用户开箱可用。Linux用户将自动安装依赖。
+
+Linux (Ubuntu 20.0)环境下安装完 Sonic Pi 后可能会出现程序无法启动的问题,这可能是因为 JACK 与 PulseAudio 在使用声卡上存在冲突造成的,参见 Sonic-Pi 仓库内这个 [issue 对该问题的讨论及最终的解决方法](https://github.com/sonic-pi-net/sonic-pi/issues/1025) 以及 [JACK 官方文档对相关问题的解释](https://jackaudio.org/faq/pulseaudio_and_jack.html)。具体的操作是:
+
+1. 在启动 Sonic-Pi 之前,先打开 QjackCtl(安装 Sonic-pi 时会自动安装),在 `Settings-Advanced`页面下,在 `Input Device` 中选择一个声卡,同时将 `Server Prefix` 修改为 `pasuspender -- /usr/bin/jackd`(我对此操作的理解是明确地为 JACK 选择一个声卡,同时暂停 PulseAudio 对它的可能占用。)
+2. 设置完成后保存,然后在控制页面上点击开始按钮,如果一切顺利终端内没有报错的话,这时再去运行 Sonic Pi 应该就会正常启动了。
+
+
+
+## 参考
- [Sonic Pi](https://sonic-pi.net/)
- [python-sonic](https://github.com/gkvoelkl/python-sonic)
diff --git a/docs/extension_guide/spheroRVR.md b/docs/extension_guide/spheroRVR.md
new file mode 100644
index 0000000..a96e5e7
--- /dev/null
+++ b/docs/extension_guide/spheroRVR.md
@@ -0,0 +1,58 @@
+# Sphero RVR
+
+
+!!! 提醒
+ 建议使用 APP 把固件升级到最新
+
+## 介绍
+RVR 是 Sphero 出品的一款教育机器人,内置多种传感器并支持丰富的硬件改装。此扩展可以实时控制通过蓝牙连接的 RVR。
+
+
+## Demo
+
+
+## 进阶
+### API
+使用 **广播** 积木调用 Python API: [Sphero Edu API](https://spherov2.readthedocs.io/en/latest/sphero_edu.html)
+
+## bug 记录
+只要 `import bleak` 就会出现这个问题.(lego mario也是)
+
+windows10 的某些版本([32bit 19041-SP0](https://item.m.jd.com/product/10026933866200.html?wxa_abtest=o&utm_source=iosapp&utm_medium=appshare&utm_campaign=t_335139774&utm_term=Wxfriends&ad_od=share&utm_user=plusmember&gx=RnFlx2ALOzTdndRJ-tE-G6S52g))认为该插件存在安全问题,导致adapter退出,参考
+
+* [How do I setup configuration when I use command line to build C#/.NET?
+](https://stackoverflow.com/questions/6469513/how-do-i-setup-configuration-when-i-use-command-line-to-build-c-net)
+* [loadFromRemoteSources](https://stackoverflow.com/questions/17615769/running-an-ironpython-script-from-python-sandbox-loadfromremotesources)
+
+造成bug的原因可能是依赖库造成的(因为调用系统蓝牙?)
+
+ps: 4.9.0 或许可用。
+
+
+
\ No newline at end of file
diff --git a/docs/extension_guide/stage.md b/docs/extension_guide/stage.md
index d53d2bb..a43fd8e 100644
--- a/docs/extension_guide/stage.md
+++ b/docs/extension_guide/stage.md
@@ -15,7 +15,7 @@ Adapter Stage 插件允许将舞台区的图像(舞台或者摄像头图像)
!!! 提醒
在 Adapter 3.2 之前,你需要自行从[插件市场](/extension_guide/extension_market/s)里下载 Stage 插件。 [源码地址](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_stage.py)
-运行 Stage 插件(当前插件的功能是把图像保存到 [Adapter Home 目录](https://adapter.codelab.club/user_guide/FAQ/#adapter)),你可以通过修改插件做其他事情。
+运行 Stage 插件(当前插件的功能是把图像保存到 [Adapter Home 目录](/user_guide/FAQ/#adapter)),你可以通过修改插件做其他事情。
如果你想使用 OpenCV 或 Tensorflow 处理图像,需要自定义[Adapter Node](/dev_guide/Adapter-Node/)
diff --git a/docs/extension_guide/sugar.md b/docs/extension_guide/sugar.md
new file mode 100644
index 0000000..4850849
--- /dev/null
+++ b/docs/extension_guide/sugar.md
@@ -0,0 +1,34 @@
+# Sugar
+
+
+
+构建 Sugar 插件的动机最初来自 @Lounsen 的想法: 接布尔量的 hat 积木。
+
+Sugar 插件是个实验室,试图为 Scratch 提供 **甜** 的语法糖。
+
+新的想法/需求,欢迎在[这个帖子](https://discuss.codelab.club/t/topic/169)下讨论
+
+# 积木介绍
+
+## 接布尔量的 hat 积木
+当情况**发生变化**,并且满足添加,才触发。类似 **当角色被点击** 积木。
+
+- [Demo](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/Scratch-when-true.sb3)
+
+
+
+上述例子,表达的是: 如果 **我的变量** 一直 **<** 50,只向前移动一次.
+
+使用hat积木我们可以构造出与 Scratch 原生事件积木类似的东西:
+
+
+
+### 与linda积木配合使用
+
+
+hat 积木中只应包含 Scratch 原生积木,最好不要放入扩展积木。
+
+可能引起异常的原因还在进一步调查中。
+
+## Color积木
+参考 [Computer Colors](https://en.scratch-wiki.info/wiki/Computer_Colors)
\ No newline at end of file
diff --git a/docs/extension_guide/switch.md b/docs/extension_guide/switch.md
new file mode 100644
index 0000000..e002e6e
--- /dev/null
+++ b/docs/extension_guide/switch.md
@@ -0,0 +1,7 @@
+# Switch
+
+我们之前的演示案例是利用 Toy-Con Garage 做的。
+
+任天堂没有开放接口。
+
+我们通过捕获 Toy-Con Garage 的视觉输出做的连接。
\ No newline at end of file
diff --git a/docs/extension_guide/teachable_machine.md b/docs/extension_guide/teachable_machine.md
index 707a12d..2dcddbe 100644
--- a/docs/extension_guide/teachable_machine.md
+++ b/docs/extension_guide/teachable_machine.md
@@ -2,29 +2,29 @@
## 介绍
-[CodeLab Adapter 接入 Teachable Machine](https://www.codelab.club/blog/adapter-teachable-machine/)
-
-## 依赖
+[CodeLab Adapter 接入 Teachable Machine](https://www-old.codelab.club/blog/adapter-teachable-machine/)
{!utils/dependence.md!}
-安装 Chrome 浏览器插件:[Tampermonkey](https://chrome.google.com/webstore/detail/tampermonkey/dhdgffkkebhmkfjojejmpbldmpobfkfo)。
-点击安装 Tampermonkey 脚本 [Teachablemachine_Result.user.js](https://gist.github.com/wwj718/78402d0de9efb8d33742c8770056489c/raw/4e1373c3ce0d1c86af93310b42321251bee567b3/Teachablemachine_Result_fixed.user.js)。
+## hello world
+
+### 打开 Teachable Machine
-## 步骤 1:打开 Codelab Adapter
+Longan团队已经将Teachable Machine部署到国内: [Longan Teachable Machine](https://train.longan.link/), 并且内置支持CodeLab Adapter, 开箱可用!
-{!utils/open_adapter.md!}
+!!! 提醒
+ 海外用户参考文末操作
-## 步骤 2:打开 [Teachable Machine](https://teachablemachine.withgoogle.com/train)
+
-完成上述工作后,打开 [Teachable Machine](https://teachablemachine.withgoogle.com/train),页面应该会弹出提示:`connected!`,表示已经将 Teachable Machine 接入 CodeLab Adapter。
+表示已经将 Teachable Machine 接入 CodeLab Adapter 了。
接下来,可以开始你的 Teachable Machine 之旅途。 我们来展示一个例子。

-## 步骤 3:打开 [Codelab Scratch3](https://scratch-beta.codelab.club/)
+### 打开 [Codelab Scratch3](https://scratch-beta.codelab.club/)
{!utils/open_scratch.md!}
@@ -40,4 +40,19 @@
!!! 提醒
Teachable Machine 的网页不能在后台运行,需要和 Scratch 一起并列在桌面上,否则程序不会运行。
+## 积木说明
+暂无
+
+## 项目链接
+暂无
+
+## FAQ
+### 海外用户如何使用
+
+如果你是海外用户,建议使用 [Google 官方的 teachablemachine](https://teachablemachine.withgoogle.com/), 你需要搭配以下插件。
+
+安装 Chrome 浏览器插件:[Tampermonkey](https://chrome.google.com/webstore/detail/tampermonkey/dhdgffkkebhmkfjojejmpbldmpobfkfo)。
+
+点击安装 Tampermonkey 脚本 [Teachablemachine_Result.user.js](https://gist.githubusercontent.com/wwj718/78402d0de9efb8d33742c8770056489c/raw/2b99784ff8cf0d344e86e8c2b781b0babfc84c33/Teachablemachine_Result_fixed.user.js)。
+运行Adapter之后如何页面弹出,已连接Adapter,则说明一切正常
\ No newline at end of file
diff --git a/docs/extension_guide/tello.md b/docs/extension_guide/tello.md
index 1f8c983..baa7b33 100644
--- a/docs/extension_guide/tello.md
+++ b/docs/extension_guide/tello.md
@@ -1,5 +1,8 @@
# DJI Tello
+!!! tello
+ 请使用 [tello2.0](/extension_guide/tello/)
+
@@ -11,6 +14,7 @@
以下是在线版使用教程,离线版基本相似。
+
### 步骤 1:打开 [CodeLab Scratch](https://scratch-beta.codelab.club?adapter_host=127.0.0.1)
运行CodeLab Adapter, 确保在线平台与Adapte连接正常。
@@ -21,7 +25,7 @@

@@ -61,3 +65,21 @@
## DJI Tello x Switch Joy-Con
+
+# 改进
+目前 Tello 的插件都已开源,很久没更新,稳定性不高,大家可以一起改进它
+
+* [extension_tello](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v3/extension_tello.py)
+* [scratch3_tello](https://github.com/CodeLabClub/scratch3_tello)
+
+!!! 提醒
+ 如果你希望做一些更复杂的事,建议直接使用社区里的 Python SDK与 设备交互,之后使用 [Adapter Node](/dev_guide/Adapter-Node/) 将其接入Adapter环境中。
+
+## Tello api 文档
+* [SDK 2.0](https://dl-cdn.ryzerobotics.com/downloads/Tello/Tello%20SDK%202.0%20User%20Guide.pdf)
+* [DJITelloPy](https://github.com/damiafuentes/DJITelloPy)
+
+* [multi_robot_drone_example](https://robomaster-dev.readthedocs.io/zh_CN/latest/python_sdk/multi_robot_drone_example.html)
\ No newline at end of file
diff --git a/docs/extension_guide/tello2.md b/docs/extension_guide/tello2.md
new file mode 100644
index 0000000..5994b04
--- /dev/null
+++ b/docs/extension_guide/tello2.md
@@ -0,0 +1,86 @@
+# Tello 2.0
+
+Tello 插件的 2.0 版本, 基于[DJITelloPy](https://github.com/damiafuentes/DJITelloPy)库。
+
+支持Tello、Tello Edu 和 Tello TT。
+
+!!! 提醒
+ Tello 会占用 wifi,导致电脑无法联网,请使用 CodeLab Adapter 的离线模式: [FAQ:离线使用](/user_guide/FAQ/#_6) (在`>=3.4.0`的版本中可用)。
+ 更好的方式可能是将Tello接入路由器上,或者使用USB无线网卡,避免电脑无法上网。
+
+以下是在线版使用教程,离线版基本相似。
+
+
+### 步骤 1:打开 [CodeLab Scratch](https://scratch-beta.codelab.club)
+运行CodeLab Adapter, 确保在线平台与Adapte连接正常。
+
+看到 [CodeLab Scratch](https://scratch-beta.codelab.club) 指示灯显示绿色,代表连接成功。
+
+
+
+
+
+### 步骤 2:连接 Tello
+
+将电脑连上 Tello 的 wifi 热点。(操作细节可以参考 Tello 说明书)
+
+### 步骤 3:开始使用
+
+选择 scratch3 中的 Tello2.0 插件.
+
+ +
+
+
+
+
+运行 Tello2.0 插件。
+
+
+
+之后依次点击 `连接tello` 、 `起飞`
+
+
+
+起飞吧!
+
+# 一些案例:
+
+## DJI Tello x Leap Motion
+
+
+
+## DJI Tello x Switch Labo
+
+
+
+## DJI Tello x Switch Joy-Con
+
+
+
+## 进阶
+你可以在 Tello 广播积木里调用 [api](https://djitellopy.readthedocs.io/en/latest/tello/)!形如: [tello.flip_left()](https://djitellopy.readthedocs.io/en/latest/tello/#djitellopy.tello.Tello.flip_left)
+
+利用API,你也可以与停机坪(机器视觉)交互([get_mission_pad_id](https://djitellopy.readthedocs.io/en/latest/tello/#djitellopy.tello.Tello.get_mission_pad_id)).API里有很多与停机坪相关的函数。
+
+如果你希望做一些更复杂的事,建议直接使用社区里的 [DJITelloPy](https://github.com/damiafuentes/DJITelloPy) 与 设备交互([api](https://djitellopy.readthedocs.io/en/latest/tello/)),之后使用 [Adapter Node](/dev_guide/Adapter-Node/) 将其接入Adapter环境中。
+
+## Tello api 文档
+* [DJITelloPy](https://github.com/damiafuentes/DJITelloPy)
+* [SDK 2.0](https://dl-cdn.ryzerobotics.com/downloads/Tello/Tello%20SDK%202.0%20User%20Guide.pdf)
+
+
+
+* [multi_robot_drone_example](https://robomaster-dev.readthedocs.io/zh_CN/latest/python_sdk/multi_robot_drone_example.html)
+
+
+
+# FAQ
+[如何排查 无法发现设备 的问题?](https://adapter.codelab.club/user_guide/FAQ/#_9)
diff --git a/docs/extension_guide/tello3.md b/docs/extension_guide/tello3.md
new file mode 100644
index 0000000..3314ddc
--- /dev/null
+++ b/docs/extension_guide/tello3.md
@@ -0,0 +1,5 @@
+# Tello 3.0
+
+支持在 scratch 中扫描连接。
+
+功能同 [tello2.0](https://adapter.codelab.club/extension_guide/tello2/)
\ No newline at end of file
diff --git a/docs/extension_guide/tello4.md b/docs/extension_guide/tello4.md
new file mode 100644
index 0000000..659ec8d
--- /dev/null
+++ b/docs/extension_guide/tello4.md
@@ -0,0 +1,77 @@
+# Tello 4.0
+
+Tello 插件的 4.0 版本, 基于 DJI 官方的 SDK: [RoboMaster SDK](https://robomaster-dev.readthedocs.io/zh_CN/latest/python_sdk/beginner_drone.html)库。
+
+能够充分利用设备的能力。
+
+相比于 [Tello 2.0 插件](/extension_guide/tello2/),4.0能够[控制 LED](https://robomaster-dev.readthedocs.io/zh_CN/latest/python_sdk/beginner_drone.html#led)
+
+# 使用说明
+目前该插件并未内置到 Adapter 中(因其复杂的打包依赖,而且跨平台兼容性不好)。
+
+我们目前将插件构建为 [Adapter Node](/dev_guide/Adapter-Node/),可以在Adapter外部以普通Python文件运行,一旦运行起来,与普通Adapter插件是一样的,能够与Adapter体系的所有事物交互。
+
+## Python环境
+首先你本地需要有 Python 环境(`Python>=3.6`)
+
+你可以到 [Python 官方](https://www.python.org/)下载,也可以使用 CodeLab放在[国内的版本(Python3.7)](https://www.codelab.club/blog/2020/08/20/tools#python)
+
+!!! 提醒
+ Mac 用户和 Linux 本地很可能内置了 Python3
+
+### 安装依赖
+```bash
+pip install robomaster codelab_adapter_client --upgrade
+```
+
+## 开始!
+
+!!! 提醒
+ Tello 会占用 wifi,导致电脑无法联网,请使用 CodeLab Adapter 的离线模式: [FAQ:离线使用](/user_guide/FAQ/#_6) (在`>=3.4.0`的版本中可用)。
+ 更好的方式可能是将Tello接入路由器上,或者使用USB无线网卡,避免电脑无法上网。
+
+
+### 步骤 1:打开 [CodeLab Scratch](https://scratch-beta.codelab.club)
+运行CodeLab Adapter, 确保在线平台与Adapte连接正常。
+
+看到 [CodeLab Scratch](https://scratch-beta.codelab.club) 指示灯显示绿色,代表连接成功。
+
+
+
+
+### 步骤 1:运行[node_tello3.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/nodes_v3/node_tello3.py)
+
+将 [node_tello3.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/nodes_v3/node_tello3.py) 插件下载到本地(随便放在一个文件夹里),在命令行中进入到这个文件夹,使用 `python node_tello3.py` 运行它。
+
+### 步骤 2:连接 Tello
+
+将电脑连上 Tello 的 wifi 热点。(操作细节可以参考 Tello 说明书)
+
+
+### 步骤 3: 起飞吧!
+
+选择 scratch3 中的 EIM 插件.
+
+
+
+以下是一个简单 demo:
+
+
+
+
+[tello3-demo](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/Scratch-tello3.sb3)
+
+
+
+
+
+
+起飞吧!
+
+# 进阶
+
+更多API参考文档: [RoboMaster SDK](https://robomaster-dev.readthedocs.io/zh_CN/latest/python_sdk/beginner_drone.html)
\ No newline at end of file
diff --git a/docs/extension_guide/tensorflow-yolov4.md b/docs/extension_guide/tensorflow-yolov4.md
index d57f858..4d3ab15 100644
--- a/docs/extension_guide/tensorflow-yolov4.md
+++ b/docs/extension_guide/tensorflow-yolov4.md
@@ -1,8 +1,8 @@
# Tutorial
-[tensorflow-yolov4](https://github.com/hhk7734/tensorflow-yolov4), 请参考文档,安装响应依赖。
+[tensorflow-yolov4](https://github.com/hhk7734/tensorflow-yolov4), 请参考文档,安装相应依赖。
-接入方法参考[使用4 行 Pyhon 代码扩展 Scratch](https://blog.just4fun.site/post/%E5%B0%91%E5%84%BF%E7%BC%96%E7%A8%8B/4-line-python-code-as-scratch-ext/)
+接入方法参考[Python对象的连接器:EIM 插件](/project_tutorial/eim_pt/)
使用前请将[coco.names](https://github.com/hhk7734/tensorflow-yolov4/tree/master/test/dataset) 和 [yolov4-tiny.weights](https://drive.google.com/file/d/1GJwGiR7rizY_19c_czuLN8p31BwkhWY5/view?usp=sharing) 下载到对应目录。
diff --git a/docs/extension_guide/tensorflow.md b/docs/extension_guide/tensorflow.md
index a11e055..a43d1fc 100644
--- a/docs/extension_guide/tensorflow.md
+++ b/docs/extension_guide/tensorflow.md
@@ -1,2 +1,6 @@
# Tensorflow
-参考[运行在树莓派中的 codelab-adapter tensorflow 插件](https://blog.just4fun.site/adapter-tensorflow.html)。
+
+
+
+
+目前北京王府国际学校在使用的 codelab-adapter-4_4_1-AI-alpha 内置 Tensorflow, 细节参考[定制与分发](https://adapter.codelab.club/dev_guide/%E5%AE%9A%E5%88%B6%E4%B8%8E%E5%88%86%E5%8F%91/)
\ No newline at end of file
diff --git a/docs/extension_guide/tuio.md b/docs/extension_guide/tuio.md
new file mode 100644
index 0000000..6905ae6
--- /dev/null
+++ b/docs/extension_guide/tuio.md
@@ -0,0 +1,25 @@
+# 激光雷达
+
+激光雷达积木是一种在Scratch舞台上创建交互式触摸作品的积木块,将房间变成 Scratch 舞台区,你可以使用身体与Scratch进行互动!
+## 使用说明
+使用前,我们需要准备好激光雷达和投影仪并进行校准,校准之后的投影区域与舞台区域坐标保持一致,x、y坐标与Scratch中的x、y坐标概念相同,也是触点中最常用的数据。当你站在Scratch舞台上时,下面的积木块可以让角色跟随你的脚移动。
+
+积木中触点的概念类似于Scratch中的鼠标指针,与鼠标指针不同的是,激光雷达积木可以让Scratch舞台区具有多点触控的能力,并且都是由你编程实现的!使用时,一种好的做法是将触点的数据映射为Scratch中的一个角色,这个角色可以得到Scratch中其他积木块的能力,如碰撞侦测。如果不想在舞台上看到角色,可以让角色在舞台上透明。
+
+
+当触点数据包含了多个触点时,使用触点列表积木可以看到全部的触点,最新触点积木会看到最新加入的触点。
+如果只想关注触点列表中的某一个触点,我们也给出了根据下标获得触点的积木。
+
+
+触点拥有自己的生命,如果使用Scratch中的克隆来完成多点触控的代码,每一个触点都是一个克隆体,当触点不再处于活动状态时,最好删除这个克隆体。
+
+
+!!! tips
+ 多点触控的代码虽然可以复用,但写法并不是唯一的。想象一下你是作品的交互设计师,可以让代码去适应你独特的交互逻辑。
+
+
+
+## Demo视频
+[交互激光雷达](https://adapter.codelab.club/extension_guide/lidar/)
+## 更多作品
+[雷达互动作品工作室](https://create.codelab.club/studios/378)
diff --git a/docs/extension_guide/vector.md b/docs/extension_guide/vector.md
index dd5248b..8ec63f6 100644
--- a/docs/extension_guide/vector.md
+++ b/docs/extension_guide/vector.md
@@ -4,7 +4,6 @@
> Anki is a company whose products always seem to delight.
-We love [Cozmo](https://www.anki.com/en-us/cozmo), and [Vector](https://www.anki.com/en-us/vector).
[Codelab Adapter](https://adapterv2.codelab.club) is a software that connect Scratch 3.0 to the open-source hardware, IoT and AI.
@@ -38,6 +37,9 @@ windows user: `python -m pip install codelab_adapter_client --upgrade --user`
Follow Vector official tutorial: [Initial Setup](https://developer.anki.com/vector/docs/initial.html)
+!!! 提醒
+ 如果 Vector 的 IP发生了变化(诸如将Vector 带入新的 wifi 环境),不需要重新认证(python3 -m anki_vector.configure), 只需要修本地改配置文件即可(第一次认证留下的), 配置文件为: `~/.anki_vector/sdk_config.ini`
+
If the following code (`hello_world.py`) runs smoothly, go to the next step.
```python
@@ -65,7 +67,7 @@ if __name__ == "__main__":
### Download Codelab Adapter
-Download Codelab Adapter
+Download Codelab Adapter
run it
diff --git a/docs/extension_guide/wechat.md b/docs/extension_guide/wechat.md
index df861d8..52cdff9 100644
--- a/docs/extension_guide/wechat.md
+++ b/docs/extension_guide/wechat.md
@@ -1,5 +1,11 @@
# Tutorial
+## 介绍
+该插件使用 [ItChat](https://github.com/littlecodersh/ItChat) 接入微信, ItChat 基于网页微信接口。
+
+!!! 提醒
+ 大量用户无法使用网页微信。可以通过扫码:[网页微信](https://wx.qq.com/) 看看自己能否登陆腾讯官方的网页微信,如果你无法登陆网页微信(腾讯对你的账号权限做了限制),则无法使用该插件。
+
## 依赖
{!utils/dependence.md!}
diff --git a/docs/extension_guide/yeelight.md b/docs/extension_guide/yeelight.md
new file mode 100644
index 0000000..235147f
--- /dev/null
+++ b/docs/extension_guide/yeelight.md
@@ -0,0 +1,16 @@
+# yeelight
+
+使用 Adapter 直接驱动 yeelight,不需要 Home Assistant/LonganHub
+
+插件源码: [node_yeelight.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/nodes_v3/node_yeelight.py)
+
+# Scratch Demo
+
+* [Scratch EIM demo](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/yeelight-eim-demo.sb3)
+ * [社区版](https://create.codelab.club/projects/8097/)
+
+# 文档
+
+[yeelight](https://yeelight.readthedocs.io/en/latest/)
+
+yeelight 速率限制为每分钟60个。如果你想解除限制,则需要使用: Music mode : `bulb.start_music()`
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/extension_Aqara_scene.py b/docs/extensions_nodes_mirrors/extension_Aqara_scene.py
index aa3ce93..cdc7ed3 100644
--- a/docs/extensions_nodes_mirrors/extension_Aqara_scene.py
+++ b/docs/extensions_nodes_mirrors/extension_Aqara_scene.py
@@ -1,5 +1,4 @@
import hashlib
-import subprocess
import sys
import time
import webbrowser
@@ -7,7 +6,6 @@
import requests
from codelab_adapter.core_extension import Extension
-from codelab_adapter.settings import TOKEN
from codelab_adapter.utils import (open_path_in_system_file_manager,
verify_token)
@@ -80,7 +78,6 @@ def run_python_code(self, code):
output = e
return output
- @verify_token
def extension_message_handle(self, topic, payload):
'''
所有可能运行代码的地方,都加上验证,确认payload中代码风险和token
diff --git a/docs/extensions_nodes_mirrors/extension_RoboMaster.py b/docs/extensions_nodes_mirrors/extension_RoboMaster.py
index 6522452..ebdbef2 100644
--- a/docs/extensions_nodes_mirrors/extension_RoboMaster.py
+++ b/docs/extensions_nodes_mirrors/extension_RoboMaster.py
@@ -5,7 +5,6 @@
from codelab_adapter.core_extension import Extension
-
class RoboMasterExtension(Extension):
NODE_ID = "eim/extension_RoboMaster"
HELP_URL = "http://adapter.codelab.club/extension_guide/RoboMaster/"
@@ -25,11 +24,11 @@ def get_robot_ip(self):
try:
ip_sock.settimeout(3)
# wait...
- ip_str = ip_sock.recvfrom(1024) # block
+ ip_str = ip_sock.recvfrom(1024) # block
host = ip_str[-1][0]
return host
except Exception as e:
- self.pub_notification(str(e),type="ERROR")
+ self.pub_notification(str(e), type="ERROR")
raise e
def create_command_socket(self):
@@ -52,10 +51,10 @@ def run(self):
# 默认建立连接
connect_msg = "command;"
command_socket.send(connect_msg.encode('utf-8'))
- buf = command_socket.recv(1024) # todo: timeout
+ buf = command_socket.recv(1024) # todo: timeout
# todo 开启事件上报, 默认开启,使用一个新的socket线程,接收事件。使用bucket token
self.logger.info(f"connect: {buf}")
- self.pub_notification("Device(RoboMaster) Connected!", type="SUCCESS")
+ self.pub_notification("RoboMasterEP 已连接", type="SUCCESS")
while self._running:
# wait for the command for the client(scratch/web app)
time.sleep(0.05)
@@ -63,11 +62,11 @@ def run(self):
payload = self.q.get()
msg = payload["content"]
# send the command to the robot
- command_socket.send(msg.encode('utf-8')) # todo: noblock
+ command_socket.send(msg.encode('utf-8')) # todo: noblock
try:
# wait for the reply
- buf = command_socket.recv(1024) # todo: timeout
+ buf = command_socket.recv(1024) # todo: timeout
output = buf.decode('utf-8')
payload["content"] = str(output)
message = {"payload": payload}
diff --git a/docs/extensions_nodes_mirrors/extension_Siri.py b/docs/extensions_nodes_mirrors/extension_Siri.py
index 4304307..646c1bf 100644
--- a/docs/extensions_nodes_mirrors/extension_Siri.py
+++ b/docs/extensions_nodes_mirrors/extension_Siri.py
@@ -9,12 +9,24 @@
import queue
import requests
-import bottle
-from bottle import route, run, template, view, request
from codelab_adapter.core_extension import Extension
-from codelab_adapter.utils import threaded, get_local_ip
-from codelab_adapter_client.utils import get_adapter_home_path
+from codelab_adapter.utils import threaded, is_win
+from codelab_adapter_client.utils import get_adapter_home_path, get_local_ip
+
+# windows pythonw
+if is_win():
+ import io
+ from contextlib import redirect_stdout, redirect_stderr
+ stdout = io.StringIO()
+ stderr = io.StringIO()
+ with redirect_stdout(stdout), redirect_stderr(stderr):
+ import bottle # flask fix windows sys.stdout.write, itchat(node)
+ from bottle import route, run, template, view, request
+else:
+ import bottle # flask fix windows sys.stdout.write, itchat(node)
+ from bottle import route, run, template, view, request
+
# html 文件所在目录
PORT = 18081
message_queue = queue.Queue()
@@ -84,7 +96,7 @@ def __init__(self, **kwargs):
@threaded
def _run_webserver_as_thread(self):
- try:
+ try:
run(host='0.0.0.0', port=self.port)
except OSError as e:
self.logger.warning(str(e))
diff --git a/docs/extensions_nodes_mirrors/extension_arduino_uno.py b/docs/extensions_nodes_mirrors/extension_arduino_uno.py
index ad2ae56..c622f8c 100644
--- a/docs/extensions_nodes_mirrors/extension_arduino_uno.py
+++ b/docs/extensions_nodes_mirrors/extension_arduino_uno.py
@@ -454,7 +454,7 @@ def run(self):
try:
self.event_loop.create_task(
- self.pub_notification(f'Arduino UNO Connected!',
+ self.pub_notification('Arduino UNO 已连接',
type="SUCCESS"))
self.event_loop.run_until_complete(self.main())
self.logger.debug("arduino thread end")
diff --git a/docs/extensions_nodes_mirrors/extension_http_eim.py b/docs/extensions_nodes_mirrors/extension_http_eim.py
index 7a17a94..a8432f2 100644
--- a/docs/extensions_nodes_mirrors/extension_http_eim.py
+++ b/docs/extensions_nodes_mirrors/extension_http_eim.py
@@ -13,8 +13,8 @@
from bottle import route, run, template, view, request
from codelab_adapter.core_extension import Extension
-from codelab_adapter.utils import threaded, get_local_ip
-from codelab_adapter_client.utils import get_adapter_home_path
+from codelab_adapter.utils import threaded
+from codelab_adapter_client.utils import get_adapter_home_path, get_local_ip
# html 文件所在目录
PORT = 18082
diff --git a/docs/extensions_nodes_mirrors/extension_jupyterlab.py b/docs/extensions_nodes_mirrors/extension_jupyterlab.py
index 65a281f..79801ed 100644
--- a/docs/extensions_nodes_mirrors/extension_jupyterlab.py
+++ b/docs/extensions_nodes_mirrors/extension_jupyterlab.py
@@ -1,16 +1,13 @@
-import os
-import pathlib
-import platform
-import subprocess
-import sys
import time
-import signal
+
+from codelab_adapter.jupyterlab_manage import jupyterlabProxy
from codelab_adapter.core_extension import Extension
-from codelab_adapter.launcher import launch_proc # just like subprocess.Popen, but better cross-platform support
from codelab_adapter.local_env import EnvManage
-from codelab_adapter.utils import get_html_message_for_no_local_python
-from codelab_adapter_client.utils import get_python3_path, install_requirement, get_adapter_home_path
+from codelab_adapter.utils import get_python3_path, get_html_message_for_no_local_python, is_linux
+from codelab_adapter_client.utils import install_requirement, get_adapter_home_path
+
+# https://github.com/jupyterlab/jupyterlab/blob/36037151f0ddddf84715d3e693f3f02dd483960d/jupyterlab/labapp.py#L409 Jupyter 的参数
class JupyterlabExtension(Extension):
@@ -31,55 +28,45 @@ def __init__(self, **kwargs):
self.jupyter_proc = None
def _install_requirement(self): # to install jupyterlab
- self.pub_notification(f"jupyterlab is being installed...")
+ self.pub_notification("正在安装 JupyterLab...")
output = install_requirement(self.REQUIREMENTS)
if output == 0:
- self.pub_notification("jupyterlab installed!")
+ self.pub_notification("JupyterLab 安装完成")
self.env_manage.set_env(None) # update env
- def run_jupyterlab(self):
- cmd = [
- self.python_path, "-m", "jupyterlab", "--notebook-dir",
- str(self.adapter_home_path)
- ]
- try:
- self.jupyter_proc = launch_proc(
- cmd,
- # shell=True,
- logger=self.logger,
- stdin=subprocess.PIPE,
- stdout=subprocess.PIPE,
- stderr=subprocess.PIPE) # work with windows
- except Exception as e:
- self.pub_notification(str(e), type="ERROR")
-
def run(self):
env = self.env_manage.get_env() # the local env, todo: docs
- if not env["local Python3"].get("path"):
- html_message = get_html_message_for_no_local_python()
- self.pub_html_notification(html_message)
- return
+ # linux (lite version)
+ if is_linux():
+ '''
+ if not env["local Python3"].get("path"):
+ html_message = get_html_message_for_no_local_python()
+ self.pub_html_notification(html_message)
+ return
+ '''
- if not env["treasure box"].get("jupyterlab"):
- self._install_requirement()
- self.pub_notification("ready to open jupyterlab...")
- self.run_jupyterlab()
+ # if not env["treasure box"].get("jupyterlab"):
+ pass
+ # self._install_requirement()
+ # self.run_jupyterlab()
+ self.pub_notification("正在启动 jupyterlab...")
+ self.jupyter_proc = jupyterlabProxy().run_jupyterlab()
while self._running:
time.sleep(1)
- def terminate(self):
+ def terminate(self, **kwargs):
'''
stop thread
'''
if self._running:
- self.pub_notification("try to stop jupyterlab")
+ self.pub_notification("正在停止 JupyterLab")
if self.jupyter_proc:
# fuck Windows! 🖕️
- self.jupyter_proc.kill()
+ self.jupyter_proc.terminate()
# os.killpg(os.getpgid(self.jupyter_proc.pid), signal.SIGTERM)
- self.jupyter_proc.wait()
+ self.jupyter_proc.join()
# 启动 node 的东西 ,使用 psutil? delegator.py?
- self.pub_notification("jupyterlab stopped")
+ self.pub_notification("JupyterLab 已停止")
time.sleep(0.1)
super().terminate()
diff --git a/docs/extensions_nodes_mirrors/extension_microbit_radio.py b/docs/extensions_nodes_mirrors/extension_microbit_radio.py
index b18ac7b..9c616a4 100644
--- a/docs/extensions_nodes_mirrors/extension_microbit_radio.py
+++ b/docs/extensions_nodes_mirrors/extension_microbit_radio.py
@@ -1,12 +1,177 @@
import time
+import serial
+import json
+from collections import deque
+import threading
+from codelab_adapter.utils import list_microbit, flash_makecode_file
+from codelab_adapter_client.utils import get_adapter_home_path, threaded
+
+# from extension_usb_microbit import MicrobitHelper # extensions/extension_usb_microbit.py
from codelab_adapter.core_extension import Extension
-from codelab_adapter.microbit_helper import MicrobitRadioHelper
+from codelab_adapter_client.thing import AdapterThing
+
+# from codelab_adapter.microbit_helper import MicrobitRadioHelper
'''
-todo 错误信息报告 通知
+todo
+ serial 锁
+ 队列/缓冲
+ 数字
+
+bug
+ 为何第一次连接 读不到versions
+
+fifo = deque()
+fifo.append(1) # deque([1])
+fifo.append(2) # deque([1, 2])
+2 in fifo # true
+fifo.popleft() # deque([2])
'''
+class ThingProxy(AdapterThing):
+ def __init__(self, node_instance):
+ super().__init__(thing_name="micro:bit-radio",
+ node_instance=node_instance)
+ # 定长 https://stackoverflow.com/questions/1931589/python-datatype-for-a-fixed-length-fifo
+ # The append() and popleft() methods are both atomic.
+ # self.write_fifo_queue = deque() # to microbit
+ # self.read_fifo_queue = deque() # from microbit
+ self.lock = threading.Lock()
+
+ def list(self, timeout=5) -> list:
+ microbit_ports = list_microbit() # return
+ if not microbit_ports:
+ self.node_instance.logger.error("未发现 micro:bit")
+ self.node_instance.pub_notification("未发现 micro:bit", type="ERROR")
+
+ return [str(i[0]) for i in microbit_ports]
+
+ # def connect(self, ip, timeout=5):
+ def connect(self, id, **kwargs):
+ self.port = id
+ # self.node_instance.logger.debug(f"args: {kwargs}")
+ if not kwargs.get("baudrate", None):
+ kwargs["baudrate"] = 115200
+ # if not kwargs.get("timeout", None):
+ timeout = kwargs["timeout"] # client输入
+ kwargs["timeout"] = 0.5 # 串口超时时间
+ ser = serial.Serial(self.port, **kwargs)
+
+ firmware_path = str(get_adapter_home_path() / "src" /
+ "makecode_radio_adapter.hex")
+ t1 = time.time()
+ # time.sleep(0.1)
+ while self.node_instance._running:
+ if time.time() - t1 >= timeout / 2:
+ # 超时没收到version信息, 可能是第一次烧录
+ self.node_instance.logger.error("get version timeout")
+ ser.close()
+ self.node_instance.pub_notification("正在刷入固件...", type="INFO")
+ flash_makecode_file(firmware_path)
+ time.sleep(10)
+ return
+ ser.write(b"version\n") # 没写进去,microbit没有反应
+ data = ser.readline() # timeout
+ if data:
+ self.node_instance.logger.debug(f"version query reply: {data}")
+ data = data.decode().strip()
+ if data.startswith("version_"):
+ version = data.split('version_')[-1]
+ self.node_instance.logger.debug(
+ f"makecode radio firmware -> {version}")
+ if version >= "0.5": # todo 0.5 set radio_03 其他不要动,固件变了
+ self.is_connected = True # 连接成功
+ self.thing = ser
+ if self.thing.name:
+ self.node_instance.pub_notification(
+ "micro:bit 已连接", type="SUCCESS")
+ self.run_task_forever()
+ return "ok"
+ else:
+ self.thing.close()
+ self.node_instance.pub_notification("正在刷入固件...",
+ type="INFO")
+ flash_makecode_file(firmware_path)
+ time.sleep(10)
+ # self.node_instance.pub_notification(self.flash_finished_notification, type="SUCCESS")
+ return # 只有串口数据是 version_xx才退出循环
+
+ def status(self, **kwargs) -> bool:
+ pass
+
+ def disconnect(self):
+ # 不要try,暴露问题
+ self.is_connected = False # todo 不需要这个,使用thing 是否存在即可
+ try:
+ self.thing.close()
+ except Exception:
+ pass
+ self.thing = None
+ self.node_instance.pub_notification(f'{self.node_instance.NODE_ID} 已断开', type="WARNING") # 切断插件?
+
+ # 业务
+ def write(self, content):
+ if self.is_connected:
+ self.lock.acquire() # todo queue? 好像某些 windows 会导致 microbit死掉 好像是发的东西不对,在 microbit 观察下
+ self.thing.write(content.encode('utf-8')) # todo 线程安全
+ # time.sleep(0.1) # 避免遗漏消息
+ self.thing.flush()
+ # 前端使用等待的
+ self.lock.release()
+ return "ok"
+
+
+ def uart_helper(self):
+ '''
+ 后台任务
+ 放入缓冲区
+ 1000个长度
+ 写入任务
+ 在同个循环里,避免跨线程
+ 使用queue跨线程
+
+ return
+ microbit output
+ '''
+ if self.is_connected:
+ try:
+ # 写入队列和读出队列
+ # write from queue
+ data = self.thing.readline() # timeout?
+ self.node_instance.logger.debug(f"readline: {data}")
+ if data:
+ data_str = data.decode()
+ return data_str.strip()
+ except Exception as e:
+ # self.is_connected = False
+ # self.thing = None
+ self.node_instance.logger.error(e)
+ self.node_instance.pub_notification(str(e), type="ERROR")
+ time.sleep(0.1) # 提示设备未连接
+ # 强行拔掉后,自行退出
+ self.node_instance.terminate() # 需要插件退出吗?
+
+ @threaded
+ def run_task_forever(self):
+ while self.node_instance._running:
+ if self.is_connected:
+ # microbit node -> microbit adapter
+ response_from_microbit = self.uart_helper()
+ if response_from_microbit:
+ if response_from_microbit.startswith('version_'):
+ # version信息, 状态机 todo
+ pass
+ else:
+ message = self.node_instance.message_template()
+ message["payload"]["content"] = response_from_microbit
+ # 来自radio的消息,与控制消息区分开
+ message["payload"]["message_type"] = 'radio_message'
+ self.node_instance.publish(message)
+ else:
+ break
+
+
class MicrobitRadioProxy(Extension):
'''
use TokenBucket to limit message rate(pub) https://github.com/CodeLabClub/codelab_adapter_client_python/blob/master/codelab_adapter_client/utils.py#L25
@@ -15,22 +180,29 @@ class MicrobitRadioProxy(Extension):
NODE_ID = "eim/extension_microbit_radio"
HELP_URL = "http://adapter.codelab.club/extension_guide/microbit_radio/"
WEIGHT = 98
- VERSION = "1.1" # 简化makecode对字符串的处理,移除\r
+ VERSION = "2.0.0" # 简化makecode对字符串的处理,移除\r
DESCRIPTION = "Microbit radio 信号中转站"
def __init__(self, **kwargs): # kwargs 接受启动参数
super().__init__(
- bucket_token=200, # 默认是100条 hub模式消息量大
+ bucket_token=100, # 默认是100条 hub模式消息量大
bucket_fill_rate=100,
**kwargs)
- self.microbitHelper = MicrobitRadioHelper(self)
+ self.thing = ThingProxy(self)
+ # self.microbitHelper = MicrobitRadioHelper(self)
def run_python_code(self, code):
# fork from python extension
try:
- output = eval(code, {"__builtins__": None}, {
- "microbitHelper": self.microbitHelper,
- })
+ output = eval(
+ code,
+ {"__builtins__": None},
+ {
+ "thing": self.thing, # 直接调用方法
+ "connect": self.thing.connect,
+ "disconnect": self.thing.disconnect,
+ "list": self.thing.list,
+ })
except Exception as e:
output = str(e)
# 也作为提醒
@@ -39,32 +211,29 @@ def run_python_code(self, code):
def extension_message_handle(self, topic, payload):
'''
- test: codelab-message-pub -j '{"topic":"scratch/extensions/command","payload":{"node_id":"eim/extension_microbit_radio", "content":"microbitHelper.write(\"c\")"}}'
+ test: codelab-message-pub -j '{"topic":"scratch/extensions/command","payload":{"node_id":"eim/extension_microbit_radio", "content":"thing.write(\"c\")"}}'
'''
self.logger.info(f'python code: {payload["content"]}')
- message_id = payload.get("message_id")
+ # message_id = payload.get("message_id")
python_code = payload["content"]
- if "microbitHelper" in python_code:
- output = self.run_python_code(python_code)
- payload["content"] = output
- message = {"payload": payload} # 无论是否有message_id都返回
- self.publish(message)
+ output = self.run_python_code(python_code)
+ try:
+ output = json.dumps(output)
+ except Exception:
+ output = str(output)
+ payload["content"] = output
+ message = {"payload": payload}
+ self.publish(message)
def run(self):
- while self._running:
- if self.microbitHelper.ser:
- # node -> microbit adapter
- response_from_microbit = self.microbitHelper.get_response_from_microbit(
- )
- # print(response_from_microbit)
- if response_from_microbit:
- print(response_from_microbit)
- message = self.message_template()
- message["payload"]["content"] = response_from_microbit
- self.publish(message)
- else:
- time.sleep(0.5)
- # 广播不在线
+ time.sleep(0.1)
+
+ def terminate(self, **kwargs):
+ try:
+ self.thing.disconnect()
+ except Exception:
+ pass
+ super().terminate(**kwargs)
export = MicrobitRadioProxy
diff --git a/docs/extensions_nodes_mirrors/extension_mqtt_adapter.py b/docs/extensions_nodes_mirrors/extension_mqtt_adapter.py
index 99d4f4f..fb195e2 100644
--- a/docs/extensions_nodes_mirrors/extension_mqtt_adapter.py
+++ b/docs/extensions_nodes_mirrors/extension_mqtt_adapter.py
@@ -45,11 +45,6 @@ def __init__(self, **kwargs):
self.client.connect(self.mqtt_addr, self.mqtt_port, 60)
self.client.loop_start() # as thread
- def exit_message_handle(self, topic, payload):
- # stop mqtt client
- self.client.loop_stop()
- self.terminate()
-
def extension_message_handle(self, topic, payload):
'''
scratch eim -> mqtt
@@ -91,5 +86,8 @@ def run(self):
# to publish mqtt message
time.sleep(0.1)
+ def terminate(self, **kwargs):
+ self.client.loop_stop()
+ super().terminate(**kwargs)
export = MqttAdapterExtension
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/extension_python.py b/docs/extensions_nodes_mirrors/extension_python.py
index ea15e57..8c6ab9e 100644
--- a/docs/extensions_nodes_mirrors/extension_python.py
+++ b/docs/extensions_nodes_mirrors/extension_python.py
@@ -1,10 +1,3 @@
-import sys
-import time
-import subprocess
-import webbrowser
-from codelab_adapter.core_extension import Extension
-from codelab_adapter.utils import verify_token, open_path_in_system_file_manager
-from codelab_adapter.settings import TOKEN
'''
当前插件只允许运行表达式
如果你希望执行任意python代码,请使用: https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v2/extension_python_kernel_exec.py,注意风险
@@ -12,10 +5,16 @@
也可以在Scratch EIM插件中运行Python代码
'''
+import time
+import webbrowser
+import requests
+from codelab_adapter.core_extension import Extension
+from codelab_adapter.utils import verify_token, open_path_in_system_file_manager
+
class PyHelper:
- def open_url(https://github.com/self,%20url):
- webbrowser.open(url)
+ def open_url(https://github.com/self,%20url,%20**kwargs):
+ webbrowser.open(url, **kwargs)
def open(self, path):
open_path_in_system_file_manager(path)
@@ -29,7 +28,7 @@ class PythonKernelExtension(Extension):
NODE_ID = "eim/extension_python"
HELP_URL = "http://adapter.codelab.club/extension_guide/extension_python_kernel/"
WEIGHT = 95
- VERSION = "1.0" # extension version
+ VERSION = "1.1" # extension version
DESCRIPTION = "Python eval"
def __init__(self, **kwargs):
@@ -37,34 +36,27 @@ def __init__(self, **kwargs):
self.PyHelper = PyHelper()
def run_python_code(self, code):
- '''
- mode
- 1 exec
- 2 eval
- 3 pass
- '''
try:
- # 出于安全考虑, 放弃使用exec,如果需要,可以自行下载exec版本
# eval(expression, globals=None, locals=None)
- # 如果只是调用(插件指责)可以使用json-rpc
output = eval(code, {"__builtins__": None}, {
"PyHelper": self.PyHelper,
+ "requests": requests,
})
except Exception as e:
- output = e
+ output = str(e)
return output
- @verify_token
+ # @verify_token
def extension_message_handle(self, topic, payload):
- '''
- 所有可能运行代码的地方,都加上验证,确认payload中代码风险和token
- '''
self.logger.info(f'python code: {payload["content"]}')
- message_id = payload.get("message_id")
python_code = payload["content"]
output = self.run_python_code(python_code)
- payload["content"] = str(output)
- message = {"payload": payload} # 无论是否有message_id都返回
+ try:
+ output = str(output) # 不要传递复杂结构
+ except Exception as e:
+ output = str(e)
+ payload["content"] = output
+ message = {"payload": payload}
self.publish(message)
def run(self):
diff --git a/docs/extensions_nodes_mirrors/extension_socket_server.py b/docs/extensions_nodes_mirrors/extension_socket_server.py
new file mode 100644
index 0000000..ebedc20
--- /dev/null
+++ b/docs/extensions_nodes_mirrors/extension_socket_server.py
@@ -0,0 +1,67 @@
+import time
+import re
+from loguru import logger
+from codelab_adapter_client.utils import send_simple_message
+from codelab_adapter.core_extension import Extension
+from socketserver import BaseRequestHandler, TCPServer
+
+
+class ScratchEchoHandler(BaseRequestHandler):
+
+ def handle(self):
+ print('Got connection from', self.client_address)
+ while True:
+ msg = self.request.recv(1024)
+ print(f'msg:${msg}')
+ if not msg:
+ break
+ else:
+ logger.debug(f'socket request message: {msg}')
+ # to adpaters
+ message_decode = msg.decode()
+ if "broadcast" in message_decode:
+ content = re.search(r'\"(.*?)\"', message_decode.split("broadcast")[-1]).groups()[0]
+ send_simple_message(content)
+ # if content == "exit":
+ # self.server.shutdown()
+ # self.server.server_close()
+ self.request.send(msg)
+
+
+class SocketServerExtension(Extension):
+ '''
+ Socket Server
+ 最初用于实现与 Etoys 互操作: https://blog.just4fun.site/post/%E5%B0%91%E5%84%BF%E7%BC%96%E7%A8%8B/etoys-learning-note/
+
+ socket client -> Scratch
+ '''
+ NODE_ID = "eim/extension_socket_server"
+ HELP_URL = "https://adapter.codelab.club/extension_guide/socket_server/" # Documentation page for the project
+ VERSION = "1.0" # extension version
+ DESCRIPTION = "Socket Server"
+ ICON_URL = ""
+ REQUIRES_ADAPTER = "" # ">= 3.2.0"
+
+ def __init__(self, **kwargs):
+ super().__init__(**kwargs)
+ self.port = 42001
+ self.address = '127.0.0.1'
+ self.socket_server = TCPServer((self.address,self.port), ScratchEchoHandler)
+
+
+ def extension_message_handle(self, topic, payload):
+ pass
+
+ def run(self):
+ # 高频消息使用 osc
+ self.socket_server.serve_forever()
+
+ def terminate(self, **kwargs):
+ self.logger.debug('terminate!')
+ self.socket_server.shutdown() # 无法外部 shutdown
+ self.socket_server.server_close()
+ super().terminate(**kwargs)
+
+
+
+export = SocketServerExtension
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/extension_tello.py b/docs/extensions_nodes_mirrors/extension_tello.py
index 75cf376..3071080 100644
--- a/docs/extensions_nodes_mirrors/extension_tello.py
+++ b/docs/extensions_nodes_mirrors/extension_tello.py
@@ -7,6 +7,8 @@
# import numpy as np
# import libh264decoder
+# todo: 只考虑简单控制
+# 基于 https://github.com/hanyazou/TelloPy
class Tello:
"""Wrapper class to interact with the Tello drone."""
diff --git a/docs/extensions_nodes_mirrors/extension_uart_adapter.py b/docs/extensions_nodes_mirrors/extension_uart_adapter.py
index 64987bf..3311627 100644
--- a/docs/extensions_nodes_mirrors/extension_uart_adapter.py
+++ b/docs/extensions_nodes_mirrors/extension_uart_adapter.py
@@ -38,10 +38,10 @@ def connect(self, port, **kwargs):
def disconnect(self, **kwargs):
if self.ser:
self.ser.close()
- self.extensionInstance.pub_notification("device disconnected!")
+ self.extensionInstance.pub_notification("设备已断开")
return "ok"
else:
- self.extensionInstance.pub_notification("Please connect the device!", type="ERROR")
+ self.extensionInstance.pub_notification("未发现可用设备", type="ERROR")
def list_ports(self):
@@ -69,7 +69,7 @@ def write(self, content):
self.extensionInstance.terminate()
else:
self.extensionInstance.pub_notification(
- "Please connect the device!", type="ERROR")
+ "未发现可用设备", type="ERROR")
self.extensionInstance.terminate()
def readline(self):
@@ -85,7 +85,7 @@ def readline(self):
self.extensionInstance.terminate()
else:
self.extensionInstance.pub_notification(
- "Please connect the device!", type="ERROR")
+ "未发现可用设备", type="ERROR")
self.extensionInstance.terminate()
diff --git a/docs/extensions_nodes_mirrors/extension_usb_microbit.py b/docs/extensions_nodes_mirrors/extension_usb_microbit.py
index 724ef81..f2f4bde 100644
--- a/docs/extensions_nodes_mirrors/extension_usb_microbit.py
+++ b/docs/extensions_nodes_mirrors/extension_usb_microbit.py
@@ -1,18 +1,214 @@
-import queue
import time
+import serial
+import json
-from codelab_adapter.microbit_helper import UsbMicrobitHelper
+from codelab_adapter.utils import list_microbit, flash_makecode_file
+from codelab_adapter_client.utils import get_adapter_home_path, threaded
+
+# from extension_usb_microbit import MicrobitHelper # extensions/extension_usb_microbit.py
from codelab_adapter.core_extension import Extension
+from codelab_adapter_client.thing import AdapterThing
+import threading
+
+# from codelab_adapter.microbit_helper import MicrobitRadioHelper
'''
-todo:
- 使用makecode构建固件
- command
- query
- event
+todo
+ serial 锁
+ 队列/缓冲
+ 数字
+
+bug
+ 为何第一次连接 读不到versions
+
+fifo = deque()
+fifo.append(1) # deque([1])
+fifo.append(2) # deque([1, 2])
+2 in fifo # true
+fifo.popleft() # deque([2])
'''
-class UsbMicrobitProxy(Extension):
+class ThingProxy(AdapterThing):
+ def __init__(self, node_instance):
+ super().__init__(thing_name="USB micro:bit",
+ node_instance=node_instance)
+ # 定长 https://stackoverflow.com/questions/1931589/python-datatype-for-a-fixed-length-fifo
+ # The append() and popleft() methods are both atomic.
+ # self.write_fifo_queue = deque() # to microbit
+ # self.read_fifo_queue = deque() # from microbit
+ self.lock = threading.Lock()
+
+ def list(self, timeout=5) -> list:
+ microbit_ports = list_microbit() # return
+ if not microbit_ports:
+ self.node_instance.logger.error("未发现 micro:bit")
+ self.node_instance.pub_notification("未发现 micro:bit", type="ERROR")
+
+ return [str(i[0]) for i in microbit_ports]
+
+ # def connect(self, ip, timeout=5):
+ def connect(self, id, **kwargs):
+ self.port = id
+ # self.node_instance.logger.debug(f"args: {kwargs}")
+ if not kwargs.get("baudrate", None):
+ kwargs["baudrate"] = 115200
+ # if not kwargs.get("timeout", None):
+ timeout = kwargs["timeout"] # client输入
+ kwargs["timeout"] = 1 # 串口超时时间
+ ser = serial.Serial(self.port, **kwargs)
+ self.thing = ser
+ firmware_path = str(get_adapter_home_path() / "src" /
+ "usb_Microbit_firmware_4v1v2.hex")
+
+ t1 = time.time()
+ # time.sleep(0.1)
+ while self.node_instance._running:
+ if time.time() - t1 >= timeout / 2:
+ # 超时没收到version信息, 可能是第一次烧录
+ self.node_instance.logger.error("get version timeout")
+ ser.close()
+ self.node_instance.pub_notification("正在刷入固件...", type="INFO")
+ flash_makecode_file(firmware_path) # todo flash_hex_file
+ time.sleep(10)
+ return
+ # self.send_command(payload="__version__", msgid="query version")
+ self.send_command()
+ # ser.write(b"version\n") # 没写进去,microbit没有反应
+ data = self.uart_helper() # timeout, 为何read没东西? 第一次
+ self.node_instance.logger.debug(f"version query reply: {data}")
+ if data:
+ if data.get("version"):
+ self.node_instance.logger.debug(
+ f"usb microbit firmware -> {data['version']}")
+ version = data.get("version")
+ if version >= "0.4": # todo 0.5 set radio_03 其他不要动,固件变了
+ self.is_connected = True # 连接成功
+ self.thing = ser
+ self.node_instance.pub_notification("micro:bit 已连接", type="SUCCESS")
+ self.run_task_forever()
+ return "ok"
+ else:
+ self.thing.close()
+ self.node_instance.pub_notification("正在刷入固件...",
+ type="INFO")
+ flash_makecode_file(firmware_path)
+ time.sleep(10)
+ # self.node_instance.pub_notification(self.flash_finished_notification, type="SUCCESS")
+ return # 只有串口数据是 version_xx才退出循环
+
+ def status(self, **kwargs) -> bool:
+ pass
+
+ def disconnect(self):
+ self.is_connected = False
+ try:
+ self.thing.close()
+ except Exception:
+ pass
+ self.thing = None
+ self.node_instance.pub_notification(f'{self.node_instance.NODE_ID} 已断开', type="WARNING")
+
+ # 业务代码
+ def write(self, content):
+ if self.is_connected:
+ self.thing.write(content.encode('utf-8')) # todo 线程安全
+ return "ok"
+
+ def _send_microbit_messge(self, data):
+ message = self.node_instance.message_template()
+ msgid = data.get("msgid")
+ message["payload"]["message_id"] = msgid
+
+ output = data.get("output")
+ if output:
+ # 正常运行了请求的代码
+ message["payload"]["content"] = output
+ self.node_instance.publish(message)
+
+ # and sensor
+ message["payload"]["message_id"] = -1
+ message["payload"]["content"] = data["payload"]
+ self.node_instance.publish(message)
+ else:
+ message["payload"]["content"] = data["payload"]
+ self.node_instance.publish(message)
+
+ def uart_helper(self):
+ '''
+ 后台任务
+ 放入缓冲区
+ 1000个长度
+ 写入任务
+ 在同个循环里,避免跨线程
+ 使用queue跨线程
+
+ return
+ microbit output
+ '''
+ try:
+ data = self.thing.readline()
+ if data:
+ data = data.decode()
+ try:
+ data = eval(data) # todo, 来自 Microbit的数据 暂无安全问题
+ except (ValueError, SyntaxError) as e:
+ # raise e
+ self.node_instance.logger.error(f"{e}: {data}")
+ else:
+ return data
+ except UnicodeDecodeError as e:
+ self.node_instance.logger.error(e)
+ except serial.serialutil.SerialException:
+ self.node_instance.pub_notification("micro:bit 连接异常", type="WARNING")
+ time.sleep(3)
+ except Exception as e:
+ self.node_instance.logger.error(e)
+ self.node_instance.pub_notification(str(e), type="ERROR")
+ # self.node_instance.logger.exception("what!")
+ time.sleep(3)
+
+ @threaded
+ def run_task_forever(self):
+ while self.node_instance._running:
+ if self.is_connected:
+ # microbit node -> microbit adapter
+ # rate = 20
+ # time.sleep(1 / rate)
+ self.send_command()
+ response_from_microbit = self.uart_helper()
+ self.node_instance.logger.debug(f'read from microbit: {response_from_microbit}')
+ if not response_from_microbit:
+ continue
+ if response_from_microbit:
+ # if response_from_microbit.startswith('version_'):
+ '''
+ version = response_from_microbit.get("version")
+ if version and version >= "0.4":
+ # version信息, 状态机 todo
+ continue
+ '''
+ self._send_microbit_messge(response_from_microbit)
+ else:
+ break
+
+ def send_command(self, payload="0", msgid=-1):
+ '''
+ payload content
+ todo message id 对应
+ '''
+ self.lock.acquire()
+ rate = 10
+ time.sleep(1 / rate)
+ scratch3_message = {"msgid": msgid, "payload": payload}
+
+ scratch3_message = json.dumps(scratch3_message) + "\r\n"
+ scratch3_message_bytes = scratch3_message.encode('utf-8')
+ self.node_instance.logger.debug(f'send to microbit: {scratch3_message_bytes}')
+ self.thing.write(scratch3_message_bytes)
+ self.lock.release()
+
+
+class MicrobitExtension(Extension):
'''
use TokenBucket to limit message rate(pub) https://github.com/CodeLabClub/codelab_adapter_client_python/blob/master/codelab_adapter_client/utils.py#L25
'''
@@ -20,61 +216,68 @@ class UsbMicrobitProxy(Extension):
NODE_ID = "eim/extension_usb_microbit"
HELP_URL = "http://adapter.codelab.club/extension_guide/microbit/"
WEIGHT = 99
+ VERSION = "2.0.0"
DESCRIPTION = "使用 Microbit, 为物理世界编程"
- def __init__(self, bucket_token=20, bucket_fill_rate=10, **kwargs):
- super().__init__(bucket_token=bucket_token,
- bucket_fill_rate=bucket_fill_rate, **kwargs)
- self.microbitHelper = UsbMicrobitHelper(self)
- self.q = queue.Queue()
+ def __init__(self, **kwargs): # kwargs 接受启动参数
+ super().__init__(
+ bucket_token=100, # 默认是100条 hub模式消息量大
+ bucket_fill_rate=100,
+ **kwargs)
+ self.thing = ThingProxy(self)
+ # self.microbitHelper = MicrobitRadioHelper(self)
def run_python_code(self, code):
# fork from python extension
try:
- output = eval(code, {"__builtins__": None}, {
- "microbitHelper": self.microbitHelper,
- })
+ output = eval(
+ code,
+ {"__builtins__": None},
+ {
+ "thing": self.thing, # 直接调用方法
+ "connect": self.thing.connect,
+ "disconnect": self.thing.disconnect,
+ "list": self.thing.list,
+ })
except Exception as e:
output = str(e)
+ # 也作为提醒
+ self.pub_notification(output, type="ERROR")
return output
def extension_message_handle(self, topic, payload):
- '''
- test: codelab-message-pub -j '{"topic":"scratch/extensions/command","payload":{"node_id":"eim/extension_usb_microbit", "content":"display.show(\"c\")"}}'
- '''
self.logger.info(f'python code: {payload["content"]}')
- message_id = payload.get("message_id")
+ # message_id = payload.get("message_id")
python_code = payload["content"]
- if "microbitHelper" in python_code:
- output = self.run_python_code(python_code)
- payload["content"] = output
- message = {"payload": payload} # 无论是否有message_id都返回
+ # send_command 直接运行 结果呢? 异步
+ # message_id = payload.get("message_id")
+ output = self.run_python_code(python_code)
+ # 运行命令和其他不一致(异步)
+ try:
+ output = json.dumps(output)
+ except Exception:
+ output = str(output)
+ if "thing.send_command(" in python_code:
+ # payload
+ # todo 异步发送
+ payload["content"] = "ok"
+ message = {"payload": payload}
self.publish(message)
+
else:
- self.q.put(python_code)
+ payload["content"] = output
+ message = {"payload": payload}
+ self.publish(message)
def run(self):
- while self._running:
- # 写入才能读出
- # 检查是否打开
- if self.microbitHelper.ser:
- try:
- self.microbitHelper.send_command()
- # 一读一写 比较稳定, todo: CQRS , todo makecode create hex
- response_from_microbit = self.microbitHelper.get_response_from_microbit(
- )
- if response_from_microbit:
- message = self.message_template()
- message["payload"]["content"] = response_from_microbit[
- "payload"]
- self.publish(message)
- rate = 10
- time.sleep(1 / rate)
- except Exception as e:
- self.logger.debug(str(e))
- time.sleep(0.5)
- else:
- time.sleep(0.5)
+ time.sleep(0.1)
+
+ def terminate(self, **kwargs):
+ try:
+ self.thing.disconnect()
+ except Exception:
+ pass
+ super().terminate(**kwargs)
-export = UsbMicrobitProxy
+export = MicrobitExtension
diff --git a/docs/extensions_nodes_mirrors/extension_webUI_manager.py b/docs/extensions_nodes_mirrors/extension_webUI_manager.py
new file mode 100644
index 0000000..bc70f7a
--- /dev/null
+++ b/docs/extensions_nodes_mirrors/extension_webUI_manager.py
@@ -0,0 +1,31 @@
+import time
+
+from codelab_adapter.core_extension import Extension
+from codelab_adapter_client.topic import GUI_TOPIC
+from codelab_adapter_client.utils import open_path, is_win
+
+
+class WebUI_Manager(Extension):
+ def __init__(self, *args, **kwargs):
+ super().__init__(*args, **kwargs)
+ self.NODE_ID = "adapter/WebUI_Manager"
+
+ def extension_message_handle(self, topic, payload):
+ content = payload["content"]
+ if content == "openHostsDir":
+ # unix/windows
+ # unix /etc/hosts
+ # windows C:\Windows\System32\drivers\etc
+ if is_win():
+ hosts_path = 'C:\Windows\System32\drivers\etc'
+ else:
+ hosts_path = '/etc'
+ self.logger.debug(payload)
+ open_path(hosts_path)
+
+ def run(self):
+ while self._running:
+ time.sleep(0.5)
+
+
+export = WebUI_Manager
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/extension_webserver.py b/docs/extensions_nodes_mirrors/extension_webserver.py
index da7daee..aeb3566 100644
--- a/docs/extensions_nodes_mirrors/extension_webserver.py
+++ b/docs/extensions_nodes_mirrors/extension_webserver.py
@@ -9,8 +9,8 @@
from bottle import route, run, template, view
from codelab_adapter.core_extension import Extension
-from codelab_adapter.utils import threaded, get_local_ip
-from codelab_adapter_client.utils import get_adapter_home_path
+from codelab_adapter.utils import threaded
+from codelab_adapter_client.utils import get_adapter_home_path, get_local_ip
# html 文件所在目录
bottle.TEMPLATE_PATH = [
diff --git a/docs/extensions_nodes_mirrors/extension_wechat.py b/docs/extensions_nodes_mirrors/extension_wechat.py
index d5832a1..d880d37 100644
--- a/docs/extensions_nodes_mirrors/extension_wechat.py
+++ b/docs/extensions_nodes_mirrors/extension_wechat.py
@@ -3,14 +3,26 @@
自动登陆默认不启用,可通过配置项启用
kill itchat thread
'''
-import itchat, time
-from itchat.content import TEXT
+
import zmq
import pathlib
import threading
-from codelab_adapter.utils import threaded
+from codelab_adapter.utils import threaded, is_win
from codelab_adapter.core_extension import Extension
+if is_win():
+ import io
+ from contextlib import redirect_stdout, redirect_stderr
+ stdout = io.StringIO()
+ stderr = io.StringIO()
+ with redirect_stdout(stdout), redirect_stderr(stderr):
+ import itchat, time
+ from itchat.content import TEXT
+else:
+ import itchat, time
+ from itchat.content import TEXT
+
+
codelab_adapter_dir = pathlib.Path.home() / "codelab_adapter"
class WechatGateway(Extension):
diff --git a/docs/extensions_nodes_mirrors/extensions_nodes.json b/docs/extensions_nodes_mirrors/extensions_nodes.json
index 8f11470..497a103 100644
--- a/docs/extensions_nodes_mirrors/extensions_nodes.json
+++ b/docs/extensions_nodes_mirrors/extensions_nodes.json
@@ -1 +1 @@
-{"nodes": [{"value": "node_physical_blocks.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_physical_blocks.py"}, {"value": "node_vector.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_vector.py"}, {"value": "node_minecraft.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_minecraft.py"}, {"value": "node_jupyterlab.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_jupyterlab.py"}, {"value": "node_cozmo.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_cozmo.py"}, {"value": "node_eim_monitor.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_eim_monitor.py"}, {"value": "node_blender.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_blender.py"}, {"value": "node_motionSensor_gesture.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_motionSensor_gesture.py"}, {"value": "node_HCI.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_HCI.py"}, {"value": "node_motionSensor_proximity.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_motionSensor_proximity.py"}, {"value": "node_eim.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_eim.py"}, {"value": "node_raspberrypi.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_raspberrypi.py"}, {"value": "node_sonicPi.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_sonicPi.py"}, {"value": "node_Yanshee.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_Yanshee.py"}], "extensions": [{"value": "extension_simple_NLU.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_simple_NLU.py"}, {"value": "extension_microbit_radio.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_microbit_radio.py"}, {"value": "extension_eim.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_eim.py"}, {"value": "extension_Siri.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_Siri.py"}, {"value": "extension_http_eim.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_http_eim.py"}, {"value": "extension_webserver.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_webserver.py"}, {"value": "extension_calypso.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_calypso.py"}, {"value": "extension_jupyterlab.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_jupyterlab.py"}, {"value": "extension_eim_monitor.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_eim_monitor.py"}, {"value": "extension_mqtt_adapter.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_mqtt_adapter.py"}, {"value": "extension_pomodoros.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_pomodoros.py"}, {"value": "extension_tello.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_tello.py"}, {"value": "extension_mqtt_broker.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_mqtt_broker.py"}, {"value": "extension_kano_wand.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_kano_wand.py"}, {"value": "extension_NetworkZero.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_NetworkZero.py"}, {"value": "extension_Aqara_scene.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_Aqara_scene.py"}, {"value": "extension_RoboMaster.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_RoboMaster.py"}, {"value": "extension_eim_trigger.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_eim_trigger.py"}, {"value": "extension_python.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_python.py"}, {"value": "extension_arduino_uno.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_arduino_uno.py"}, {"value": "extension_stage.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_stage.py"}, {"value": "extension_uart_adapter.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_uart_adapter.py"}, {"value": "extension_python_exec.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_python_exec.py"}, {"value": "extension_wechat.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_wechat.py"}, {"value": "extension_usb_microbit.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_usb_microbit.py"}]}
\ No newline at end of file
+{"nodes": [{"value": "node_physical_blocks.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_physical_blocks.py"}, {"value": "node_vector.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_vector.py"}, {"value": "node_minecraft.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_minecraft.py"}, {"value": "node_yeelight.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_yeelight.py"}, {"value": "node_RoboMasterEP2.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_RoboMasterEP2.py"}, {"value": "node_jupyterlab.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_jupyterlab.py"}, {"value": "node_tello4.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_tello4.py"}, {"value": "node_cozmo.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_cozmo.py"}, {"value": "node_eim_monitor.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_eim_monitor.py"}, {"value": "node_blender.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_blender.py"}, {"value": "node_motionSensor_gesture.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_motionSensor_gesture.py"}, {"value": "node_HCI.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_HCI.py"}, {"value": "node_physical_blocks2.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_physical_blocks2.py"}, {"value": "node_thingDemo.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_thingDemo.py"}, {"value": "node_adapterMario.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_adapterMario.py"}, {"value": "node_motionSensor_proximity.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_motionSensor_proximity.py"}, {"value": "node_tello2.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_tello2.py"}, {"value": "node_webserver_flask.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_webserver_flask.py"}, {"value": "node_RoboMaster2.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_RoboMaster2.py"}, {"value": "node_overdrive2.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_overdrive2.py"}, {"value": "node_RoboMaster3.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_RoboMaster3.py"}, {"value": "node_overdrive.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_overdrive.py"}, {"value": "node_eim.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_eim.py"}, {"value": "node_tello3.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_tello3.py"}, {"value": "node_raspberrypi.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_raspberrypi.py"}, {"value": "node_sonicPi.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_sonicPi.py"}, {"value": "node_Yanshee.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_Yanshee.py"}, {"value": "node_alphamini.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_alphamini.py"}, {"value": "node_digimon.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_digimon.py"}], "extensions": [{"value": "extension_simple_NLU.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_simple_NLU.py"}, {"value": "extension_microbit_radio.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_microbit_radio.py"}, {"value": "extension_eim.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_eim.py"}, {"value": "extension_Siri.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_Siri.py"}, {"value": "extension_http_eim.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_http_eim.py"}, {"value": "extension_webserver.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_webserver.py"}, {"value": "extension_calypso.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_calypso.py"}, {"value": "extension_jupyterlab.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_jupyterlab.py"}, {"value": "extension_eim_monitor.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_eim_monitor.py"}, {"value": "extension_mqtt_adapter.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_mqtt_adapter.py"}, {"value": "extension_pomodoros.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_pomodoros.py"}, {"value": "extension_webUI_manager.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_webUI_manager.py"}, {"value": "extension_tello.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_tello.py"}, {"value": "extension_mqtt_broker.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_mqtt_broker.py"}, {"value": "extension_kano_wand.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_kano_wand.py"}, {"value": "extension_NetworkZero.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_NetworkZero.py"}, {"value": "extension_socket_server.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_socket_server.py"}, {"value": "extension_Aqara_scene.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_Aqara_scene.py"}, {"value": "extension_RoboMaster.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_RoboMaster.py"}, {"value": "extension_eim_trigger.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_eim_trigger.py"}, {"value": "extension_python.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_python.py"}, {"value": "extension_arduino_uno.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_arduino_uno.py"}, {"value": "extension_stage.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_stage.py"}, {"value": "extension_uart_adapter.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_uart_adapter.py"}, {"value": "extension_wechat.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_wechat.py"}, {"value": "extension_usb_microbit.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_usb_microbit.py"}]}
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/node_HCI.py b/docs/extensions_nodes_mirrors/node_HCI.py
index 686fdf4..0938b1d 100644
--- a/docs/extensions_nodes_mirrors/node_HCI.py
+++ b/docs/extensions_nodes_mirrors/node_HCI.py
@@ -1,44 +1,33 @@
'''
HCI: human–machine interaction
本插件支持将任何输入映射为鼠标键盘行为
-
-PyAutoGUI only runs on Windows, Mac, and Linux.
-If you lose control and need to stop the current PyAutoGUI function, keep moving the mouse cursor up and to the left.
-
-tips:
- currentMouseX, currentMouseY = pyautogui.position()
- pyautogui.moveTo(100, 150)
- pyautogui.click()
- pyautogui.moveRel(None, 10) # move mouse 10 pixels down
- pyautogui.typewrite('Hello world!', interval=0.25)
-
'''
import queue
import time
-import pyautogui # todo 自动安装
from codelab_adapter_client import AdapterNode
+from codelab_adapter_client.utils import install_requirement
+
+try:
+ import pyautogui
+except ModuleNotFoundError:
+ REQUIREMENTS = ["pyautogui"]
+ install_requirement(REQUIREMENTS)
+ import pyautogui
class HCINode(AdapterNode):
- '''
- Everything Is Message
- ref: https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v2/extension_python_kernel.py
- '''
NODE_ID = "eim/node_HCI"
WEIGHT = 98
HELP_URL = "https://adapter.codelab.club/extension_guide/HCI/"
DESCRIPTION = "接管鼠标键盘"
VERSION = "1.1.0"
- def __init__(self):
- super().__init__()
+ def __init__(self, **kwargs):
+ super().__init__(**kwargs)
self.q = queue.Queue()
def extension_message_handle(self, topic, payload):
- # self.q.put(payload)
- # payload = self.q.get()
- message_id = payload.get("message_id")
python_code = payload["content"]
try:
output = eval(python_code, {"__builtins__": None}, {
@@ -50,17 +39,14 @@ def extension_message_handle(self, topic, payload):
message = {"payload": payload}
self.publish(message)
- def exit_message_handle(self, topic, payload):
- self.terminate()
-
def run(self):
while self._running:
time.sleep(0.5)
-if __name__ == "__main__":
+def main(**kwargs):
try:
- node = HCINode()
+ node = HCINode(**kwargs)
node.receive_loop_as_thread()
node.run()
except KeyboardInterrupt:
@@ -69,4 +55,8 @@ def run(self):
node.logger.error(str(e))
node.pub_notification(str(e), type="ERROR")
time.sleep(0.05)
- node.terminate() # Clean up before exiting.
\ No newline at end of file
+ node.terminate() # Clean up before exiting.
+
+
+if __name__ == "__main__":
+ main()
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/node_RoboMaster2.py b/docs/extensions_nodes_mirrors/node_RoboMaster2.py
new file mode 100644
index 0000000..1be7dd4
--- /dev/null
+++ b/docs/extensions_nodes_mirrors/node_RoboMaster2.py
@@ -0,0 +1,136 @@
+'''
+pip install robomasterpy==0.1.1
+ node 在外层依赖即可,window mac会提示依赖
+# https://robomasterpy.nanmu.me/en/latest/
+# https://github.com/nanmu42/robo-playground
+'''
+
+import socket
+import time
+import json
+from loguru import logger
+
+from codelab_adapter_client import AdapterNode # todo 异步插件启动确认
+from codelab_adapter_client.thing import AdapterThing
+
+import robomasterpy as rm # rm.get_broadcast_ip(timeout=1)
+
+
+class EPProxy(AdapterThing):
+ '''
+ AdapterThing
+ init
+ self.thing_name
+ self.node_instance
+ self.is_connected = False
+ self.thing = None
+ python eval code
+ connect
+ robot.chassis_move(x=-1, z=30) # thing不存在
+ # 分派方法和参数
+ '''
+ def __init__(self, node_instance):
+ # todo pydanic
+ super().__init__(thing_name="Robomaster EP",
+ node_instance=node_instance)
+
+ def list(self, timeout=5):
+ try:
+ broadcast_ip = rm.get_broadcast_ip(timeout=timeout) # 多个怎么办?
+ return [str(broadcast_ip)]
+ except socket.timeout:
+ self.node_instance.pub_notification(
+ f"timeout({timeout}s) when get_broadcast_ip", type="ERROR")
+ return []
+ except Exception as e:
+ self.node_instance.pub_notification(
+ str(e), type="ERROR")
+ return []
+ # 销毁socket
+
+ def connect(self, ip, timeout=5):
+ # 修改 self.thing
+ self.thing = rm.Commander(ip, timeout)
+
+ def status(self, **kwargs) -> bool:
+ # check status
+ # query thing status, 与设备通信,检查 is_connected 状态,修改它
+ pass
+
+ def disconnect(self):
+ self.thing.close(
+ ) # 关闭实例,回收socket资源。注意这个命令并不会发送quit到机甲,避免打扰其他在线的Commander.
+ # 允许多个client控制一个机甲
+ self.is_connected = False
+ self.thing = None
+
+ # 转发
+ # cmd.chassis_move(x=-1, z=30)
+ # self.thing.chassis_move(x=-1, z=30)
+ # robot.thing.chassis_move(x=-1, z=30)
+
+
+class EPExtension(AdapterNode):
+ NODE_ID = "eim/node_RoboMaster2"
+ HELP_URL = "http://adapter.codelab.club/extension_guide/RoboMaster2/"
+ DESCRIPTION = "开火!RoboMaster"
+ VERSION = "2.0.0"
+
+ def __init__(self):
+ super().__init__(logger=logger)
+ self.ep = EPProxy(self) # create proxy object
+
+ def run_python_code(self, code):
+ try:
+ output = eval(
+ code,
+ {"__builtins__": None},
+ {
+ "robot": self.ep.thing, # 直接调用方法
+ "connect": self.ep.connect,
+ "disconnect": self.ep.disconnect,
+ "list": self.ep.list,
+ })
+ except Exception as e:
+ # logger.exception('what?')
+ output = e
+ return output
+
+ def extension_message_handle(self, topic, payload):
+ # todo 判断是否连接成功,否则报告连接问题
+
+ logger.info(f'code: {payload["content"]}')
+ python_code = payload["content"]
+ output = self.run_python_code(python_code)
+ try:
+ output = json.dumps(output)
+ except Exception:
+ output = str(output)
+ payload["content"] = output
+ message = {"payload": payload}
+ self.publish(message)
+
+ def run(self):
+ while self._running:
+ time.sleep(0.5)
+
+ # release robot proxy object
+ def terminate(self, **kwargs):
+ try:
+ if self.ep.is_connected:
+ self.ep.disconnect()
+ except Exception:
+ pass
+ super().terminate(**kwargs)
+
+
+if __name__ == "__main__":
+ try:
+ node = EPExtension()
+ node.receive_loop_as_thread()
+ node.run()
+ except Exception as e:
+ if node._running:
+ node.pub_notification(str(e), type="ERROR")
+ time.sleep(0.1)
+ node.terminate()
diff --git a/docs/extensions_nodes_mirrors/node_RoboMaster3.py b/docs/extensions_nodes_mirrors/node_RoboMaster3.py
new file mode 100644
index 0000000..3af5207
--- /dev/null
+++ b/docs/extensions_nodes_mirrors/node_RoboMaster3.py
@@ -0,0 +1,91 @@
+'''
+pip install robomaster codelab_adapter_client --upgrade
+doc: https://robomaster-dev.readthedocs.io/zh_CN/latest/python_sdk/beginner_ep.html
+仅支持
+ macOS >= 10.15
+ Window amd64
+
+策略作为外部 Node,能够和Adapter通信
+
+使用 EIM 测试: eim/extension_RoboMasterEP3
+'''
+
+import time
+from loguru import logger
+from codelab_adapter_client import AdapterNode
+from codelab_adapter_client.utils import get_or_create_node_logger_dir
+from robomaster import robot
+from robomaster import blaster
+
+node_logger_dir = get_or_create_node_logger_dir()
+debug_log = str(node_logger_dir / "debug.log")
+logger.add(debug_log, rotation="1 MB", level="DEBUG")
+
+
+class EP3Node(AdapterNode):
+ NODE_ID = "eim/extension_RoboMasterEP3"
+ HELP_URL = "https://adapter.codelab.club/extension_guide/RoboMaster_EP2/"
+ DESCRIPTION = "RoboMaster EP 3.0"
+
+ def __init__(self):
+ super().__init__(logger=logger)
+ self.ep_robot = None
+
+ def init_device(self, timeout=5, conn_type="sta"):
+ '''
+ conn_type
+ sta 机器人接入局域网
+ ap 机器人作为热点
+ '''
+ # todo timeout
+ self.ep_robot = robot.Robot()
+ self.ep_robot.initialize(conn_type=conn_type)
+ self.pub_notification("RoboMaster 已连接", type="SUCCESS")
+
+ def run_python_code(self, code):
+ try:
+ # 允许用户传入连接参数 init_device
+ output = eval(code, {"__builtins__": None}, {"ep_robot": self.ep_robot, "blaster": blaster, "init_device": self.init_device})
+ except Exception as e:
+ output = e
+ return output
+
+ def extension_message_handle(self, topic, payload):
+ self.logger.info(f'code: {payload["content"]}')
+ message_id = payload.get("message_id")
+ python_code = payload["content"]
+ if self.ep_robot:
+ output = self.run_python_code(python_code)
+ payload["content"] = str(output)
+ message = {"payload": payload}
+ self.publish(message)
+
+ def run(self):
+ "避免插件结束退出"
+ try:
+ self.init_device()
+ except Exception as e:
+ self.logger.error(e)
+ self.pub_notification(str(e), type="ERROR")
+ return
+ while self._running:
+ time.sleep(0.5)
+
+ def terminate(self, **kwargs):
+ try:
+ if self.ep_robot:
+ self.ep_robot.close()
+ self.ep_robot = None
+ except Exception as e:
+ self.pub_notification(str(e), type="ERROR")
+ time.sleep(0.1)
+ super().terminate(**kwargs)
+
+if __name__ == "__main__":
+ try:
+ node = EP3Node()
+ node.receive_loop_as_thread()
+ node.run()
+ except:
+ if node._running:
+ node.terminate()
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/node_RoboMasterEP2.py b/docs/extensions_nodes_mirrors/node_RoboMasterEP2.py
new file mode 100644
index 0000000..6257ecf
--- /dev/null
+++ b/docs/extensions_nodes_mirrors/node_RoboMasterEP2.py
@@ -0,0 +1,143 @@
+'''
+pip install robomasterpy==0.1.1
+ node 在外层依赖即可,window mac会提示依赖
+# https://robomasterpy.nanmu.me/en/latest/
+# https://github.com/nanmu42/robo-playground
+'''
+
+import socket
+import time
+import json
+from loguru import logger
+
+from codelab_adapter_client import AdapterNode # todo 异步插件启动确认
+from codelab_adapter_client.thing import AdapterThing
+
+import robomasterpy as rm # rm.get_broadcast_ip(timeout=1)
+
+
+class EPProxy(AdapterThing):
+ '''
+ AdapterThing
+ init
+ self.thing_name
+ self.node_instance
+ self.is_connected = False
+ self.thing = None
+ python eval code
+ connect
+ robot.chassis_move(x=-1, z=30) # thing不存在
+ # 分派方法和参数
+ '''
+ def __init__(self, node_instance):
+ # todo pydanic
+ super().__init__(thing_name="Robomaster EP",
+ node_instance=node_instance)
+
+ def list(self, timeout=5):
+ try:
+ broadcast_ip = rm.get_broadcast_ip(timeout=timeout) # 多个怎么办?
+ return [str(broadcast_ip)]
+ except socket.timeout:
+ # self.node_instance.pub_notification(f"获取设备IP超时({timeout}s)", type="ERROR")
+ self.node_instance.pub_notification("未发现 RoboMasterEP", type="ERROR")
+ return []
+ except Exception as e:
+ self.node_instance.pub_notification(
+ str(e), type="ERROR")
+ return []
+
+ def connect(self, ip, timeout=5):
+ # 修改 self.thing, connect失败呢?
+ try:
+ self.thing = rm.Commander(ip, timeout)
+ self.node_instance.pub_notification("RoboMasterEP 已连接", type="SUCCESS")
+ except Exception as e:
+ self.node_instance.pub_notification(str(e), type="ERROR")
+
+ def status(self, **kwargs) -> bool:
+ # check status
+ # query thing status, 与设备通信,检查 is_connected 状态,修改它
+ pass
+
+ def disconnect(self):
+ if self.thing:
+ self.thing.close() # 关闭实例,回收socket资源。注意这个命令并不会发送quit到机甲,避免打扰其他在线的Commander.
+ # 允许多个client控制一个机甲
+ self.is_connected = False
+ self.thing = None
+
+ # 转发
+ # cmd.chassis_move(x=-1, z=30)
+ # self.thing.chassis_move(x=-1, z=30)
+ # robot.thing.chassis_move(x=-1, z=30)
+
+
+class EPExtension(AdapterNode):
+ NODE_ID = "eim/node_RoboMasterEP2"
+ HELP_URL = "http://adapter.codelab.club/extension_guide/RoboMasterEP2/"
+ DESCRIPTION = "开火!RoboMaster EP"
+ VERSION = "2.0.1" # 处理connect问题
+
+ def __init__(self, **kwargs):
+ super().__init__(logger=logger, **kwargs)
+ self.ep = EPProxy(self) # create proxy object
+
+ def run_python_code(self, code):
+ try:
+ output = eval(
+ code,
+ {"__builtins__": None},
+ {
+ "robot": self.ep.thing, # 直接调用方法
+ "connect": self.ep.connect,
+ "disconnect": self.ep.disconnect,
+ "list": self.ep.list,
+ })
+ except Exception as e:
+ # logger.exception('what?')
+ output = e
+ return output
+
+ def extension_message_handle(self, topic, payload):
+ # todo 判断是否连接成功,否则报告连接问题
+
+ logger.info(f'code: {payload["content"]}')
+ python_code = payload["content"]
+ output = self.run_python_code(python_code)
+ try:
+ output = json.dumps(output)
+ except Exception:
+ output = str(output)
+ payload["content"] = output
+ message = {"payload": payload}
+ self.publish(message)
+
+ def run(self):
+ while self._running:
+ time.sleep(0.5)
+
+ # release robot proxy object
+ def terminate(self, **kwargs):
+ try:
+ if self.ep.is_connected:
+ self.ep.disconnect()
+ except Exception:
+ pass
+ super().terminate(**kwargs)
+
+
+def main(**kwargs):
+ try:
+ node = EPExtension(**kwargs)
+ node.receive_loop_as_thread()
+ node.run()
+ except Exception as e:
+ if node._running:
+ node.pub_notification(str(e), type="ERROR")
+ time.sleep(0.1)
+ node.terminate()
+
+
+if __name__ == "__main__":
+ main()
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/node_adapterMario.py b/docs/extensions_nodes_mirrors/node_adapterMario.py
new file mode 100644
index 0000000..ad8c80f
--- /dev/null
+++ b/docs/extensions_nodes_mirrors/node_adapterMario.py
@@ -0,0 +1,283 @@
+import asyncio
+import json
+import time
+try:
+ from bleak import BleakScanner, BleakClient, BleakError # 有些windows无法使用
+except Exception:
+ pass
+from codelab_adapter_client import AdapterNodeAio
+from codelab_adapter_client.thing import AdapterThing
+from codelab_adapter_client.utils import is_win
+
+from codelab_adapter_client.config import settings
+from loguru import logger
+debug_log = str(settings.NODE_LOG_PATH / "adapterMario.log")
+logger.add(debug_log, rotation="1 MB", level="DEBUG")
+
+
+# Class for the controller
+class MarioController(AdapterThing):
+ LEGO_CHARACTERISTIC_UUID = "00001624-1212-efde-1623-785feabcd123"
+ SUBSCRIBE_IMU_COMMAND = bytearray(
+ [0x0A, 0x00, 0x41, 0x00, 0x00, 0x05, 0x00, 0x00, 0x00, 0x01])
+ SUBSCRIBE_RGB_COMMAND = bytearray(
+ [0x0A, 0x00, 0x41, 0x01, 0x00, 0x05, 0x00, 0x00, 0x00, 0x01])
+
+ def __init__(self, node_instance):
+ super().__init__(thing_name="Mario", node_instance=node_instance)
+ self.current_x = 0
+ self.current_y = 0
+ self.current_z = 0
+ self.is_connected = False
+ self.task = None
+
+ self.devices_list = {}
+ self.device_flag = "lego"
+ self.scanner = None
+ # self.q = queue.Queue()
+
+ def _detection_ble_callback(self, device, advertisement_data):
+ # devices_list 实时更新
+ if self.device_flag in str(device).lower():
+ self.devices_list[str(device.address)] = {
+ "name": str(device.address),
+ "peripheralId": str(device.address),
+ "rssi": device.rssi,
+ }
+ message = self.node_instance.message_template()
+ message["payload"]["message_type"] = "devices_list"
+ message["payload"]["content"] = list(self.devices_list.values())
+
+ asyncio.create_task(self.node_instance.publish(message))
+
+ async def list(self, timeout=5) -> list:
+ # logger.debug("list devices...")
+ self.devices_list = {} # 清空
+ try:
+ scanner = BleakScanner()
+ self.scanner = scanner
+ scanner.register_detection_callback(self._detection_ble_callback)
+ await scanner.start()
+ await asyncio.sleep(5.0)
+ await self.scanner.stop()
+ except BleakError as e:
+ # 提醒开启蓝牙
+ logger.error(e)
+ await self.node_instance.pub_notification(str(e), type="ERROR")
+ return []
+
+ async def _send_connect_reply(self):
+ # from RVR
+ payload = self.node_instance.connect_payload
+ message = {"payload": payload}
+ await self.node_instance.publish(message)
+
+ async def _send_disconnect_message(self):
+ await self.node_instance.pub_notification(
+ f'{self.node_instance.NODE_ID} 已断开', type="WARNING")
+
+ async def _connect(self, address):
+ async with BleakClient(address) as client:
+ await client.is_connected()
+ # 连接成功反馈
+ await self._send_connect_reply()
+ self.is_connected = True
+ await client.start_notify(self.LEGO_CHARACTERISTIC_UUID,
+ self.notification_handler)
+ await asyncio.sleep(0.1)
+ await client.write_gatt_char(self.LEGO_CHARACTERISTIC_UUID,
+ self.SUBSCRIBE_IMU_COMMAND)
+ await asyncio.sleep(0.1)
+ await client.write_gatt_char(self.LEGO_CHARACTERISTIC_UUID,
+ self.SUBSCRIBE_RGB_COMMAND)
+ while await client.is_connected():
+ await asyncio.sleep(0.1)
+ # 发送断开消息
+ # disconnect
+ await self._send_disconnect_message()
+
+ async def connect(self, address, timeout=5):
+ if not self.thing:
+ # self.thing = BleakClient(address)
+ # as task
+ # 等待future, 外部停掉
+ self.task = asyncio.create_task(
+ self._connect(address)) # todo 真正连上后发出
+ # await asyncio.sleep(3)
+ return True
+
+ async def status(self):
+ pass
+
+ async def disconnect(self):
+ if self.task:
+ self.task.cancel() # 让用户知道错误信息
+ self.is_connected = False
+ if self.thing:
+ await self.thing.disconnect()
+ self.thing = None
+ return True
+
+ ### 以下是具体设备驱动
+
+ def signed(self, char):
+ return char - 256 if char > 127 else char
+
+ async def _send_to_adapter(self, content, message_type="setProperty"):
+ message = self.node_instance.message_template()
+ message["payload"]["message_type"] = message_type
+ message["payload"]["content"] = content
+ # property_notify属性的变化
+ await self.node_instance.publish(message)
+
+ def property_notify(self, data):
+ '''
+ msg = {
+ "topic": "things/urn:lego:mario/state",
+ "messageType": "setProperty",
+ "data": data
+ }
+ '''
+ logger.debug(f'data: {data}')
+ asyncio.create_task(self._send_to_adapter(data))
+ # self.q.put(data) # sync -> async
+ # send to eim
+ # validate_msg = InputMsg(**msg)
+ # ee.emit("things/urn:lego:mario", validate_msg)
+
+ def notification_handler(self, sender, data):
+ # Camera sensor data
+ # todo eim
+ if data[0] == 8:
+ # RGB code
+ if data[5] == 0x0:
+ # print(data[4])
+ if data[4] == 0xb8:
+ logger.debug("Start tile")
+ self.property_notify({"barcode": "Start"})
+ if data[4] == 0xb7:
+ logger.debug("Goal tile")
+ self.property_notify({"barcode": "Goal"})
+ logger.debug("Barcode: " + " ".join(hex(n) for n in data))
+
+ # Red tile
+ elif data[6] == 0x15:
+ # print("Red tile")
+ self.property_notify({"color": "Red"})
+ # Green tile
+ elif data[6] == 0x25:
+ # print("Green tile")
+ self.property_notify({"color": "Green"})
+ elif data[6] == 0x17:
+ # print("Blue tile")
+ self.property_notify({"color": "Blue"})
+ elif data[6] == 0x17:
+ # print("Blue tile")
+ self.property_notify({"color": "Blue"})
+ elif data[6] == 0x13:
+ # print("White tile")
+ self.property_notify({"color": "White"})
+ elif data[6] == 0x18:
+ # # print("Yellow tile")
+ self.property_notify({"color": "Yellow"})
+ elif data[6] == 0x6A:
+ ## print("Brown tile")
+ self.property_notify({"color": "Brown"})
+ # No tile
+ elif data[6] == 0x1a:
+ # # print("No tile")
+ self.property_notify({"color": "NoColor"})
+
+ # Accelerometer data
+ elif data[0] == 7:
+ self.current_x = int((self.current_x * 0.5) +
+ (self.signed(data[4]) * 0.5))
+ self.current_y = int((self.current_y * 0.5) +
+ (self.signed(data[5]) * 0.5))
+ self.current_z = int((self.current_z * 0.5) +
+ (self.signed(data[6]) * 0.5))
+ self.property_notify({
+ "coordinate": {
+ "x": self.current_x,
+ "y": self.current_y,
+ "z": self.current_z
+ }
+ })
+ '''
+ # 在 scratch 中处理,利用hat积木的特性: 如无变化,只发生一次
+ if self.current_z > 15:
+ self.property_notify({"action": "backward"})
+ elif self.current_z < -15:
+ self.property_notify({"action": "forward"})
+ if self.current_x > 20:
+ self.property_notify({"action": "jump"}) # todo? 时间?
+ '''
+ # # print("X: %i | Y: %i | Z: %i" % (self.current_x, self.current_y, self.current_z))
+
+
+class MyNode(AdapterNodeAio):
+ NODE_ID = "eim/node_adapterMario"
+ HELP_URL = "https://adapter.codelab.club/extension_guide/adapterMario/"
+ DESCRIPTION = "登登登等登蹬"
+ VERSION = "2.1.0" # 设备掉线通知
+
+ def __init__(self, **kwargs):
+ super().__init__(logger=logger, bucket_token=300, bucket_fill_rate=300, **kwargs)
+ self.thing = MarioController(self)
+ self.connect_payload = None
+
+ async def run_python_code(self, code):
+ try:
+ output = await eval(
+ code,
+ {"__builtins__": None},
+ {
+ # "thing": self.thing.thing, # 推送风格
+ "connect": self.thing.connect,
+ "disconnect": self.thing.disconnect,
+ "list": self.thing.list,
+ })
+ except Exception as e:
+ output = e
+ return output
+
+ async def extension_message_handle(self, topic, payload):
+ self.logger.info(f'code: {payload["content"]}')
+ python_code = payload["content"]
+ if python_code.startswith('connect('):
+ # connect
+ self.connect_payload = payload
+ output = await self.run_python_code(python_code)
+ try:
+ output = json.dumps(output)
+ except Exception:
+ output = str(output)
+ if not python_code.startswith('connect('):
+ # connect 连上之后(异步)发送
+ payload["content"] = output
+ message = {"payload": payload}
+ await self.publish(message)
+
+ def run(self):
+ while self._running:
+ time.sleep(0.5)
+
+ async def terminate(self, **kwargs):
+ try:
+ await self.thing.disconnect()
+ except Exception:
+ pass
+ await super().terminate(**kwargs)
+
+
+def main(**kwargs):
+ try:
+ node = MyNode(**kwargs)
+ asyncio.run(node.receive_loop()) # CPU?
+ except Exception:
+ if node._running:
+ asyncio.run(node.terminate())
+
+
+if __name__ == "__main__":
+ main()
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/node_alphamini.py b/docs/extensions_nodes_mirrors/node_alphamini.py
new file mode 100644
index 0000000..2c4245d
--- /dev/null
+++ b/docs/extensions_nodes_mirrors/node_alphamini.py
@@ -0,0 +1,340 @@
+'''
+pip install alphamini==1.1.0
+https://web.ubtrobot.com/mini-python-sdk/guide.html
+https://github.com/marklogg/mini_demo.git
+
+内置行为: https://web.ubtrobot.com/mini-python-sdk/additional.html
+'''
+
+import asyncio
+from loguru import logger
+
+from codelab_adapter_client import AdapterNodeAio # todo 异步插件启动确认
+from codelab_adapter_client.thing import AdapterThing
+
+import mini.mini_sdk as MiniSdk
+from mini.apis.base_api import MiniApiResultType
+from mini.dns.dns_browser import WiFiDevice
+from mini.apis.api_sound import StartPlayTTS, StopPlayTTS, ControlTTSResponse
+from mini.apis.api_action import PlayAction, PlayActionResponse
+from mini.apis.api_action import GetActionList, GetActionListResponse, RobotActionType
+from mini.apis.api_setup import StartRunProgram
+from mini.apis.api_action import MoveRobot, MoveRobotDirection, MoveRobotResponse
+from mini.apis.api_expression import PlayExpression, PlayExpressionResponse
+from mini.apis.api_behavior import StartBehavior, StopBehavior
+
+from mini.apis.api_sence import FaceAnalysis, FaceAnalyzeResponse
+from mini.apis.api_sence import FaceDetect, FaceDetectResponse
+from mini.apis.api_sence import FaceRecognise, FaceRecogniseResponse
+# 使用异步节点
+
+# 红外测距
+from mini.apis.api_sence import GetInfraredDistance, GetInfraredDistanceResponse
+# 物体识别 水果 鲜花 手势
+from mini.apis.api_sence import ObjectRecognise, RecogniseObjectResponse, ObjectRecogniseType
+
+
+class RobotProxy(AdapterThing):
+ '''
+ AdapterThing
+ init
+ self.thing_name
+ self.node_instance
+ self.is_connected = False
+ self.thing = None
+ '''
+ def __init__(self, node_instance):
+ # todo pydanic
+ super().__init__(thing_name="悟空机器人(alphamini)", node_instance=node_instance)
+
+ async def list(self):
+ # 需要在UI中填入序列号连接
+ # 课堂 在UI输入序列号连接
+ # self._ensure_connect()
+ return
+
+ '''
+ results = await MiniSdk.get_device_list(10) # 无法搜到
+ # print(results)
+ return [str(i) for i in results]
+ '''
+
+ async def connect(self, robot_name):
+ # 修改 self.thing
+ if self.is_connected:
+ return f"{self.thing_name} already connected"
+ else:
+ # robot_name = kwargs.get("robot_name") # todo
+ self.thing: WiFiDevice = await MiniSdk.get_device_by_name(
+ robot_name, 10)
+ if self.thing:
+ is_success = await MiniSdk.connect(self.thing)
+ if is_success:
+ self.is_connected = True
+ # (resultType, response) = await StartRunProgram().execute() #
+ await MiniSdk.enter_program()
+ # await self.say()
+ # await asyncio.sleep(100)
+ return is_success
+
+ def status(self, **kwargs) -> bool:
+ # check status
+ # query thing status, 与设备通信,检查 is_connected 状态,修改它
+ pass
+
+ # disconnect, 兼容
+ async def quit(self):
+ self._ensure_connect()
+ await MiniSdk.quit_program()
+ await MiniSdk.release()
+ self.is_connected = False
+ self.thing = None
+
+ async def disconnect(self):
+ return await self.quit()
+
+ ################## 以下是业务逻辑
+
+ async def GetActionList(self):
+ self._ensure_connect()
+ # robot.play(name="bow",speed="slow",operation="start")
+ block: GetActionList = GetActionList(action_type=RobotActionType.INNER)
+ # response:GetActionListResponse
+ (resultType, response) = await block.execute()
+ return response
+
+ async def play_action(self, **kwargs):
+ '''
+ https://web.ubtrobot.com/mini-python-sdk/additional.html#id2
+ https://web.ubtrobot.com/mini-python-sdk/additional.html#id3
+
+ 010 打招呼
+ 011 点头
+ 012 俯卧撑
+ 013 武术
+ 014 太极
+ 027 坐下
+ 031 蹲下
+ 017 举双手
+ 015 欢迎
+ 037 摇头
+ Surveillance_001 打招呼
+ Surveillance_004 飞吻
+ Surveillance_006 卖萌
+ action_016 再见
+ action_014 邀请
+ action_005 点赞
+ '''
+ self._ensure_connect()
+ block: PlayAction = PlayAction(**kwargs)
+ # response: PlayActionResponse
+ (resultType, response) = await block.execute()
+ return response
+
+ async def play_expression(self, **kwargs):
+ '''
+ codemao9 打喷嚏
+ codemao13 疑问
+ codemao16 贱贱的笑
+ codemao20 眨眼
+ emo_020 发呆
+ codemao19 爱心
+ '''
+ self._ensure_connect()
+ # https://web.ubtrobot.com/mini-python-sdk/additional.html#id4
+ block: PlayExpression = PlayExpression(**kwargs)
+ # response: PlayExpressionResponse
+ (resultType, response) = await block.execute()
+ return response
+
+ async def play_behavior(self, **kwargs):
+ '''
+ custom_0035 生日快乐
+ dance_0008 虫儿飞
+ '''
+ self._ensure_connect()
+ # https://web.ubtrobot.com/mini-python-sdk/additional.html#id4
+ block = StartBehavior(**kwargs)
+ if kwargs.get("is_serial"):
+ (resultType, response) = await block.execute()
+ return response
+ else:
+ return await block.execute()
+
+ async def stop_behavior(self, **kwargs):
+ '''
+ custom_0035 生日快乐
+ dance_0008 虫儿飞
+ '''
+ self._ensure_connect()
+ # https://web.ubtrobot.com/mini-python-sdk/additional.html#id4
+ block = StopBehavior(**kwargs)
+ (resultType, response) = await block.execute()
+ return response
+
+ async def move(self, step=1, direction="FORWARD"):
+ '''
+ FORWARD : 向前
+ BACKWARD : 向后
+ LEFTWARD : 向左
+ RIGHTWARD : 向右
+ '''
+ self._ensure_connect()
+ block: MoveRobot = MoveRobot(step=step,
+ direction=MoveRobotDirection[direction])
+ (resultType, response) = await block.execute()
+ return response
+
+ async def bow(self):
+ self._ensure_connect()
+ # robot.play(name="bow",speed="slow",operation="start")
+ pass
+
+ async def say(self, **kwargs):
+ self._ensure_connect()
+ block: StartPlayTTS = StartPlayTTS(**kwargs)
+ # 返回元组, response是个ControlTTSResponse
+ (resultType, response) = await block.execute()
+
+ ### 人脸api: https://github.com/marklogg/mini_demo/blob/42cacfa5c8e8a47ed343ab61c691c1973b17e742/test/test_sence.py#L18
+ async def face_detect(self, timeout=10):
+ block: FaceDetect = FaceDetect(timeout=timeout)
+ # response: FaceDetectResponse
+ (resultType, response) = await block.execute()
+ logger.debug(f'test_face_detect result: {response}')
+
+ assert resultType == MiniApiResultType.Success, 'face_detect timetout'
+ assert response is not None and isinstance(response, FaceDetectResponse), 'face_detect result unavailable'
+ assert response.isSuccess, 'face_detect failed'
+
+ return response.count # 人脸个数
+
+ async def face_analysis(self, timeout=10):
+ # https://github.com/marklogg/mini_demo/blob/42cacfa5c8e8a47ed343ab61c691c1973b17e742/test/test_sence.py#L43
+ block: FaceAnalysis = FaceAnalysis(timeout=timeout)
+ # response: FaceAnalyzeResponse
+ (resultType, response) = await block.execute()
+
+ logger.debug(f'test_face_analysis result: {response}')
+ # print('code = {0}, error={1}'.format(response.resultCode, errors.get_vision_error_str(response.resultCode)))
+
+ assert resultType == MiniApiResultType.Success, 'face_analysis timetout'
+ assert response is not None and isinstance(response, FaceAnalyzeResponse), 'face_analysis result unavailable'
+ assert response.isSuccess, 'face_analysis failed'
+ # gender: 小于50为女性,大于50为男性
+ return response # {"age": 24, "gender": 99, "height": 238, "width": 238}
+
+ async def face_recognise(self, timeout=10):
+ # https://github.com/marklogg/mini_demo/blob/42cacfa5c8e8a47ed343ab61c691c1973b17e742/test/test_sence.py#L182
+ # response : FaceRecogniseResponse
+ (resultType, response) = await FaceRecognise(timeout=timeout).execute()
+
+ logger.debug(f'face_recognise result: {response}')
+
+ assert resultType == MiniApiResultType.Success, 'face_recognise timetout'
+ assert response is not None and isinstance(response,
+ FaceRecogniseResponse), 'face_recognise result unavailable'
+ assert response.isSuccess, 'face_recognise failed'
+ return response.faceInfos # id name
+
+ # 测试获取红外探测距离
+ async def get_infrared_distance(self):
+ (resultType, response) = await GetInfraredDistance().execute()
+
+ # print(f'test_get_infrared_distance result: {response}')
+
+ assert resultType == MiniApiResultType.Success, 'get_infrared_distance timetout'
+ assert response is not None and isinstance(response,
+ GetInfraredDistanceResponse), 'get_infrared_distance result unavailable'
+ assert response.distance > 0, 'get_infrared_distance failed'
+ return response.distance
+
+ # 物体识别
+ async def recognise_gesture(self, timeout=10):
+ """测试物体(手势)识别
+ """
+ # object_type: 支持FLOWER, FRUIT, GESTURE 三类物体
+ block: ObjectRecognise = ObjectRecognise(object_type=ObjectRecogniseType.GESTURE, timeout=timeout)
+ # response : RecogniseObjectResponse
+ (resultType, response) = await block.execute()
+
+ logger.debug(f'recognise_gesture result: {response}')
+
+ assert resultType == MiniApiResultType.Success, 'recognise_gesture timetout'
+ assert response is not None and isinstance(response,
+ RecogniseObjectResponse), 'recognise_gesture result unavailable'
+ assert response.isSuccess, 'recognise_gesture failed'
+ return response.objects
+
+ async def recognise_fruit(self, timeout=10):
+ """测试物体(水果)识别
+ """
+ # object_type: 支持FLOWER, FRUIT, GESTURE 三类物体
+ block: ObjectRecognise = ObjectRecognise(object_type=ObjectRecogniseType.FRUIT, timeout=timeout)
+ # response : RecogniseObjectResponse
+ (resultType, response) = await block.execute()
+
+ logger.debug(f'test_object_recognise_fruit result: {response}')
+
+ assert resultType == MiniApiResultType.Success, 'recognise_fruit timetout'
+ assert response is not None and isinstance(response,
+ RecogniseObjectResponse), 'recognise_fruit result unavailable'
+ assert response.isSuccess, 'recognise_fruit failed'
+ return response.objects
+
+ # 语音识别
+ # https://github.com/marklogg/mini_demo/blob/42cacfa5c8e8a47ed343ab61c691c1973b17e742/test/test_event.py#L16
+
+class MiniExtension(AdapterNodeAio):
+ NODE_ID = "eim/node_alphamini"
+ HELP_URL = "https://adapter.codelab.club/extension_guide/node_alphamini/"
+ DESCRIPTION = "悟空是一只伪装成机器人的猴子"
+ VERSION = "1.2.0"
+
+ def __init__(self, **kwargs):
+ super().__init__(logger=logger, **kwargs)
+ self.thing = RobotProxy(self) # create robot proxy object
+
+ async def run_python_code(self, code):
+ try:
+ output = await eval(
+ code,
+ {"__builtins__": None},
+ {
+ # "api_instance": self.thing.api_instance,
+ "robot": self.thing
+ })
+ except Exception as e:
+ # todo 完整错误
+ # logger.exception('what?')
+ output = e
+ return output
+
+ async def extension_message_handle(self, topic, payload):
+ # todo 判断是否连接成功,否则报告连接问题
+
+ logger.info(f'code: {payload["content"]}')
+ # message_id = payload.get("message_id")
+ python_code = payload["content"]
+ output = await self.run_python_code(python_code)
+ payload["content"] = str(output)
+ message = {"payload": payload}
+ await self.publish(message)
+
+ # release robot proxy object
+ async def terminate(self, **kwargs):
+ if self.thing.is_connected:
+ await self.thing.disconnect()
+ await super().terminate(**kwargs)
+
+
+def main(**kwargs):
+ try:
+ node = MiniExtension(**kwargs)
+ asyncio.run(node.receive_loop())
+ except KeyboardInterrupt:
+ if node._running:
+ asyncio.run(node.terminate())
+
+if __name__ == "__main__":
+ main()
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/node_blender.py b/docs/extensions_nodes_mirrors/node_blender.py
index acca811..63aa3a9 100644
--- a/docs/extensions_nodes_mirrors/node_blender.py
+++ b/docs/extensions_nodes_mirrors/node_blender.py
@@ -33,9 +33,6 @@ def extension_message_handle(self, topic, payload):
message = {"payload": payload}
self.publish(message)
- def exit_message_handle(self, topic, payload):
- self.terminate()
-
@threaded
def run(self):
while self._running:
diff --git a/docs/extensions_nodes_mirrors/node_cozmo.py b/docs/extensions_nodes_mirrors/node_cozmo.py
index 0c9b487..516fe43 100644
--- a/docs/extensions_nodes_mirrors/node_cozmo.py
+++ b/docs/extensions_nodes_mirrors/node_cozmo.py
@@ -2,68 +2,114 @@
usage:
python cozmo_server.py
+多台机器人
+ https://github.com/anki/cozmo-python-sdk/blob/dd29edef18748fcd816550469195323842a7872e/examples/multi_robot/multi_robot_unified.py
+ 默认采用优先发现原则 https://github.com/anki/cozmo-python-sdk/blob/dd29edef18748fcd816550469195323842a7872e/src/cozmo/run.py#L400
ref:
https://github.com/anki/cozmo-python-sdk/blob/master/examples/apps/remote_control_cozmo.py#L335
+
+get status
+ https://github.com/wwj718/calypso/blob/master/server.py#L353
+
+调试
+ https://github.com/anki/cozmo-python-sdk/blob/master/examples/apps/cli.py
'''
import queue
+import json
import time
-import importlib
-from loguru import logger
from codelab_adapter_client import AdapterNode
-from codelab_adapter_client.utils import get_or_create_node_logger_dir, install_requirement
-# import os
-# logger.warning(dict(os.environ))
-# log for debug
-node_logger_dir = get_or_create_node_logger_dir()
-debug_log = str(node_logger_dir / "debug.log")
+from codelab_adapter_client.utils import install_requirement
+from codelab_adapter_client.thing import AdapterThing
+from codelab_adapter_client.utils import threaded
+
+import cozmo
+from cozmo.util import degrees, distance_mm, speed_mmps, Pose
+from codelab_adapter_client.config import settings
+from loguru import logger
+debug_log = str(settings.NODE_LOG_PATH / "cozmo.log")
logger.add(debug_log, rotation="1 MB", level="DEBUG")
-class CozmoNode(AdapterNode):
- NODE_ID = "eim/node_cozmo"
- WEIGHT = 100
- HELP_URL = "https://adapter.codelab.club/extension_guide/cozmo/"
- VERSION = "1.2.1"
- DESCRIPTION = "最好的 AI 教育机器人之一"
- REQUIREMENTS = ["cozmo"]
+class CozmoProxy(AdapterThing):
+ def __init__(self, node_instance):
+ super().__init__(thing_name="Cozmo", node_instance=node_instance)
+ self.disconnect_flag = False
- def __init__(self):
- super().__init__(logger=logger)
- self.q = queue.Queue()
+ def _say_hi(self, robot):
+ # pass
+ # robot.say_text("hi").wait_for_completed()
+ pass
- def _import_requirement_or_import(self):
- requirement = self.REQUIREMENTS
+ def list(self, timeout=5) -> list:
+ if self.thing:
+ # 检查是否连接正常
+ return ["Cozmo"]
try:
- importlib.import_module("cozmo")
- except ModuleNotFoundError:
- self.pub_notification(f'try to install {" ".join(requirement)}...')
- install_requirement(requirement)
- self.pub_notification(f'{" ".join(requirement)} installed!')
- importlib.import_module("cozmo")
- import cozmo
- from cozmo.util import degrees, distance_mm, speed_mmps
- global cozmo, degrees, distance_mm, speed_mmps # make it global
+ # message id返回
+ cozmo.run_program(self._say_hi) # 联通性测试!
+ return ["Cozmo"]
+ except: # 不能加Exception 协程
+ # cozmo 有问题? 如果正常连接呢?
+ # self.node_instance.logger.error()
+ self.node_instance.pub_notification("未发现 Cozmo",
+ type="ERROR")
+ # self.node_instance.terminate()
+ return []
- def extension_message_handle(self, topic, payload):
- self.q.put(payload)
+ @threaded
+ def _connect(self):
+ # RuntimeError: This event loop is already running
+ cozmo.run_program(self.cozmo_program)
+ # todo 需要在主线程打开
+ # cozmo.run_program(self.cozmo_program, use_3d_viewer=True, use_viewer=True)
+ '''
+ try:
+ # 阻塞
+ except:
+ self.thing = None # ??
+ '''
+
+ def connect(self, ip, timeout=5):
+ if self.thing:
+ # 之前连过
+ return
+ self.is_connected = True
+ self._connect()
+ time.sleep(0.5)
- def exit_message_handle(self, topic, payload):
- self.terminate()
+ def status(self, **kwargs) -> bool:
+ pass
+ def disconnect(self):
+ # self.node_instance
+ self.node_instance.pub_notification(f'{self.node_instance.NODE_ID} 已断开', type="WARNING")
+ if self.thing:
+ try:
+ self.thing.say_text("see you later").wait_for_completed()
+ except Exception as e:
+ self.node_instance.logger.error(str(e))
+ self.thing = None
+ self.is_connected = False
+ self.disconnect_flag = True
+ time.sleep(0.1) # 等待检测
+ self.disconnect_flag = False
+ # self.node_instance.terminate() # 断开 重复连接cozmo可能有问题
+
+ # 业务
def pub_event(self, event_name, event_param=""):
- message = self.message_template()
+ message = self.node_instance.message_template()
message["payload"]["message_type"] = "device_event"
message["payload"]["content"] = {
"event_name": event_name,
"event_param": event_param
}
- self.publish(message)
+ self.node_instance.publish(message)
def onObjectTapped(self, evt, obj, **kwargs):
# 事件数量巨大
object_id = obj.object_id
- self.logger.debug(object_id)
+ self.node_instance.logger.debug(object_id)
event_name = "ObjectTapped"
event_param = object_id
self.pub_event(event_name, event_param)
@@ -95,18 +141,18 @@ def onObjectMovingStarted(self, evt, obj, **kwargs):
# face
def onFaceAppeared(self, evt, face, **kwargs):
event_name = "FaceAppeared"
- self.logger.debug(face.name)
- self.logger.debug(face.known_expression)
+ self.node_instance.logger.debug(face.name)
+ self.node_instance.logger.debug(face.known_expression)
event_param = face.known_expression
self.pub_event(event_name, event_param)
def onFaceObserved(self, evt, face, **kwargs):
# expression -> FACIAL_EXPRESSION_HAPPY("happy")
event_name = "FaceObserved"
- self.logger.debug(face.name)
- self.logger.debug(face.known_expression)
+ self.node_instance.logger.debug(face.name)
+ self.node_instance.logger.debug(face.known_expression)
event_param = face.known_expression
- self.logger.debug(
+ self.node_instance.logger.debug(
f'face name -> {face.name}, face expression -> {face.known_expression}'
)
if event_param:
@@ -120,29 +166,29 @@ def onFaceDisappeared(self, evt, face, **kwargs):
# pets
def onPetAppeared(self, evt, pet, **kwargs):
# 与face机制不一致
- self.logger.debug("PetAppeared")
- self.logger.debug(pet.pet_type)
+ self.node_instance.logger.debug("PetAppeared")
+ self.node_instance.logger.debug(pet.pet_type)
event_name = "PetAppeared"
event_param = pet.pet_type
self.pub_event(event_name, event_param)
def onPetObserved(self, evt, pet, **kwargs):
- self.logger.debug("PetObserved")
- self.logger.debug(pet.pet_type)
+ self.node_instance.logger.debug("PetObserved")
+ self.node_instance.logger.debug(pet.pet_type)
event_name = "PetObserved"
event_param = pet.pet_type
self.pub_event(event_name, event_param)
def onPetDisappeared(self, evt, pet, **kwargs):
- self.logger.debug("PetDisappeared")
- self.logger.debug(pet.pet_type)
+ self.node_instance.logger.debug("PetDisappeared")
+ self.node_instance.logger.debug(pet.pet_type)
event_name = "PetDisappeared"
event_param = pet.pet_type
self.pub_event(event_name, event_param)
def onRobotObservedMotion(self, evt, **kwargs):
event_name = "RobotObservedMotion" # EvtRobotObservedMotion
- logger.debug(event_name)
+ self.node_instance.logger.debug(event_name)
self.pub_event(event_name)
def cozmo_program(self, robot):
@@ -153,6 +199,10 @@ def cozmo_program(self, robot):
cozmo.world.EvtNewCameraImage
'''
# Object
+ self.thing = robot
+ self.node_instance.pub_notification("Cozmo 已连接", type="SUCCESS")
+ robot.say_text("hi").wait_for_completed()
+ # robot.enable_facial_expression_estimation(enable=True)
robot.add_event_handler(cozmo.objects.EvtObjectTapped,
self.onObjectTapped)
# ObjectObserved 发送频率非常高 会导致冲刷缓存变量(todo 优化 js extension 消息接收机制)
@@ -165,7 +215,13 @@ def cozmo_program(self, robot):
robot.add_event_handler(cozmo.objects.EvtObjectMovingStarted,
self.onObjectMovingStarted)
- # face
+ # face todo 启动人脸识别 enable
+ '''
+ 表情 启动
+ http://cozmosdk.anki.com/docs/generated/cozmo.robot.html#cozmo.robot.Robot.enable_facial_expression_estimation
+ robot.enable_facial_expression_estimation(enable=True)
+ http://cozmosdk.anki.com/docs/generated/cozmo.faces.html#cozmo.faces.FACIAL_EXPRESSION_UNKNOWN
+ '''
robot.add_event_handler(cozmo.faces.EvtFaceAppeared,
self.onFaceAppeared)
robot.add_event_handler(cozmo.faces.EvtFaceObserved,
@@ -182,35 +238,97 @@ def cozmo_program(self, robot):
# world Camera
# robot.add_event_handler(cozmo.camera.EvtRobotObservedMotion, self.onRobotObservedMotion)
- self.pub_notification("Cozmo Connected!", type="SUCCESS")
- while self._running:
- time.sleep(0.05)
- if not self.q.empty():
- payload = self.q.get()
- self.logger.info(f'python: {payload}')
- message_id = payload.get("message_id")
+ while self.node_instance._running:
+ if self.disconnect_flag:
+ # self.thing = None
+ # self.is_connected = False
+ break
+ time.sleep(0.1)
+ # 消息取来在内部运行
+ '''
+ if not self.node_instance.q.empty():
+ payload = self.node_instance.q.get()
+ # self.node_instance.logger.info(f'python: {payload}')
python_code = payload["content"]
-
try:
output = eval(python_code, {"__builtins__": None}, {
+ "robot": robot,
"cozmo": cozmo,
- "robot": robot
})
except Exception as e:
output = e
- self.pub_notification(str(e), type="ERROR")
+ self.node_instance.pub_notification(str(e), type="ERROR")
payload["content"] = str(output)
message = {"payload": payload}
self.publish(message)
+ # 把 message id 丢出去
+ '''
+
+
+class CozmoNode(AdapterNode):
+ NODE_ID = "eim/node_cozmo"
+ WEIGHT = 100
+ HELP_URL = "https://adapter.codelab.club/extension_guide/cozmo/"
+ VERSION = "2.1.0" # 支持表情
+ DESCRIPTION = "最好的 AI 教育机器人之一"
+
+ def __init__(self, **kwargs):
+ super().__init__(logger=logger, **kwargs)
+ # self.q = queue.Queue()
+ self.thing = CozmoProxy(self)
+
+ def extension_message_handle(self, topic, payload):
+ python_code = payload["content"]
+ # if python_code.startswith("robot."):
+ # self.q.put(payload)
+ try:
+ output = eval(
+ python_code,
+ {"__builtins__": None},
+ {
+ # "robot": robot,
+ "list": self.thing.list,
+ "connect": self.thing.connect,
+ "disconnect": self.thing.disconnect,
+ "robot": self.thing.thing,
+ "cozmo": cozmo,
+ "degrees": degrees,
+ "distance_mm": distance_mm,
+ "speed_mmps": speed_mmps,
+ "Pose": Pose,
+ "dir": dir,
+ "help": help
+ })
+ except Exception as e:
+ output = e
+ self.pub_notification(str(e), type="ERROR")
+ try:
+ output = json.dumps(output) # 单引号 json
+ except Exception:
+ output = str(output)
+ payload["content"] = str(output)
+ message = {"payload": payload}
+ self.publish(message)
def run(self):
- self._import_requirement_or_import()
- cozmo.run_program(self.cozmo_program)
+ while self._running:
+ # "robot": self.thing.thing,
+ if self.thing.thing and not self.thing.thing.world.conn.is_connected:
+ self.logger.debug(f"conn: {self.thing.thing.world.conn.is_connected}")
+ # self.thing.disconnect()
+ self.terminate()
+ self.logger.debug("go on...")
+ time.sleep(0.5)
+ # 发现,已经连接了,如果无法发现则说明有问题
+ # 利用 except 知道不存在 list
+ def terminate(self, **kwargs):
+ super().terminate(**kwargs)
-if __name__ == "__main__":
+
+def main(**kwargs):
try:
- node = CozmoNode()
+ node = CozmoNode(**kwargs)
node.receive_loop_as_thread()
node.run()
except KeyboardInterrupt:
@@ -220,3 +338,7 @@ def run(self):
node.pub_notification(str(e), type="ERROR")
time.sleep(0.05)
node.terminate() # Clean up before exiting.
+
+
+if __name__ == "__main__":
+ main()
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/node_digimon.py b/docs/extensions_nodes_mirrors/node_digimon.py
new file mode 100644
index 0000000..ba0cc9f
--- /dev/null
+++ b/docs/extensions_nodes_mirrors/node_digimon.py
@@ -0,0 +1,120 @@
+'''
+fork from node_webserver_flask
+'''
+import time
+import os
+import sys
+import webbrowser
+from loguru import logger
+from codelab_adapter_client import AdapterNode
+from codelab_adapter_client.utils import get_or_create_node_logger_dir, install_requirement, threaded, get_local_ip, send_simple_message
+from flask import Flask
+from flask import request
+
+# log for debug
+node_logger_dir = get_or_create_node_logger_dir()
+debug_log = str(node_logger_dir / "debug.log")
+logger.add(debug_log, rotation="1 MB", level="DEBUG")
+
+app = Flask(__name__)
+
+
+@app.route('/')
+def hello_world():
+ return 'Hello, 被选召的孩子!'
+
+
+@app.route('/digimon')
+def digimon():
+ # queue to adapter
+ name = request.args.get('name', default=None)
+ # send
+ send_simple_message(f'digimon {name}')
+ # logger.debug
+ digimon_info = {
+ "microbit": {
+ "name": "micro:bit",
+ "img": "https://img/",
+ },
+ "cozmo": {
+ "name": "Cozmo",
+ "description": "拥有惊人的灵活性,像微缩版的瓦力,性格阴晴不定,做游戏时喜欢耍小聪明",
+ "img": "https://scratch3-files.just4fun.site/cozmo-gif.gif",
+ "url": "https://adapter.codelab.club/extension_guide/cozmo/"
+ },
+ "alphamini": {},
+ "codelab": {},
+ "mushrooms":{},
+ }
+
+ return f'''
+
+
+
+
+
+
+
+
+运行 Tello2.0 插件。
+
+
+
+之后依次点击 `连接tello` 、 `起飞`
+
+
+
+起飞吧!
+
+# 一些案例:
+
+## DJI Tello x Leap Motion
+
+
+
+## DJI Tello x Switch Labo
+
+
+
+## DJI Tello x Switch Joy-Con
+
+
+
+## 进阶
+你可以在 Tello 广播积木里调用 [api](https://djitellopy.readthedocs.io/en/latest/tello/)!形如: [tello.flip_left()](https://djitellopy.readthedocs.io/en/latest/tello/#djitellopy.tello.Tello.flip_left)
+
+利用API,你也可以与停机坪(机器视觉)交互([get_mission_pad_id](https://djitellopy.readthedocs.io/en/latest/tello/#djitellopy.tello.Tello.get_mission_pad_id)).API里有很多与停机坪相关的函数。
+
+如果你希望做一些更复杂的事,建议直接使用社区里的 [DJITelloPy](https://github.com/damiafuentes/DJITelloPy) 与 设备交互([api](https://djitellopy.readthedocs.io/en/latest/tello/)),之后使用 [Adapter Node](/dev_guide/Adapter-Node/) 将其接入Adapter环境中。
+
+## Tello api 文档
+* [DJITelloPy](https://github.com/damiafuentes/DJITelloPy)
+* [SDK 2.0](https://dl-cdn.ryzerobotics.com/downloads/Tello/Tello%20SDK%202.0%20User%20Guide.pdf)
+
+
+
+* [multi_robot_drone_example](https://robomaster-dev.readthedocs.io/zh_CN/latest/python_sdk/multi_robot_drone_example.html)
+
+
+
+# FAQ
+[如何排查 无法发现设备 的问题?](https://adapter.codelab.club/user_guide/FAQ/#_9)
diff --git a/docs/extension_guide/tello3.md b/docs/extension_guide/tello3.md
new file mode 100644
index 0000000..3314ddc
--- /dev/null
+++ b/docs/extension_guide/tello3.md
@@ -0,0 +1,5 @@
+# Tello 3.0
+
+支持在 scratch 中扫描连接。
+
+功能同 [tello2.0](https://adapter.codelab.club/extension_guide/tello2/)
\ No newline at end of file
diff --git a/docs/extension_guide/tello4.md b/docs/extension_guide/tello4.md
new file mode 100644
index 0000000..659ec8d
--- /dev/null
+++ b/docs/extension_guide/tello4.md
@@ -0,0 +1,77 @@
+# Tello 4.0
+
+Tello 插件的 4.0 版本, 基于 DJI 官方的 SDK: [RoboMaster SDK](https://robomaster-dev.readthedocs.io/zh_CN/latest/python_sdk/beginner_drone.html)库。
+
+能够充分利用设备的能力。
+
+相比于 [Tello 2.0 插件](/extension_guide/tello2/),4.0能够[控制 LED](https://robomaster-dev.readthedocs.io/zh_CN/latest/python_sdk/beginner_drone.html#led)
+
+# 使用说明
+目前该插件并未内置到 Adapter 中(因其复杂的打包依赖,而且跨平台兼容性不好)。
+
+我们目前将插件构建为 [Adapter Node](/dev_guide/Adapter-Node/),可以在Adapter外部以普通Python文件运行,一旦运行起来,与普通Adapter插件是一样的,能够与Adapter体系的所有事物交互。
+
+## Python环境
+首先你本地需要有 Python 环境(`Python>=3.6`)
+
+你可以到 [Python 官方](https://www.python.org/)下载,也可以使用 CodeLab放在[国内的版本(Python3.7)](https://www.codelab.club/blog/2020/08/20/tools#python)
+
+!!! 提醒
+ Mac 用户和 Linux 本地很可能内置了 Python3
+
+### 安装依赖
+```bash
+pip install robomaster codelab_adapter_client --upgrade
+```
+
+## 开始!
+
+!!! 提醒
+ Tello 会占用 wifi,导致电脑无法联网,请使用 CodeLab Adapter 的离线模式: [FAQ:离线使用](/user_guide/FAQ/#_6) (在`>=3.4.0`的版本中可用)。
+ 更好的方式可能是将Tello接入路由器上,或者使用USB无线网卡,避免电脑无法上网。
+
+
+### 步骤 1:打开 [CodeLab Scratch](https://scratch-beta.codelab.club)
+运行CodeLab Adapter, 确保在线平台与Adapte连接正常。
+
+看到 [CodeLab Scratch](https://scratch-beta.codelab.club) 指示灯显示绿色,代表连接成功。
+
+
+
+
+### 步骤 1:运行[node_tello3.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/nodes_v3/node_tello3.py)
+
+将 [node_tello3.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/nodes_v3/node_tello3.py) 插件下载到本地(随便放在一个文件夹里),在命令行中进入到这个文件夹,使用 `python node_tello3.py` 运行它。
+
+### 步骤 2:连接 Tello
+
+将电脑连上 Tello 的 wifi 热点。(操作细节可以参考 Tello 说明书)
+
+
+### 步骤 3: 起飞吧!
+
+选择 scratch3 中的 EIM 插件.
+
+
+
+以下是一个简单 demo:
+
+
+
+
+[tello3-demo](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/Scratch-tello3.sb3)
+
+
+
+
+
+
+起飞吧!
+
+# 进阶
+
+更多API参考文档: [RoboMaster SDK](https://robomaster-dev.readthedocs.io/zh_CN/latest/python_sdk/beginner_drone.html)
\ No newline at end of file
diff --git a/docs/extension_guide/tensorflow-yolov4.md b/docs/extension_guide/tensorflow-yolov4.md
index d57f858..4d3ab15 100644
--- a/docs/extension_guide/tensorflow-yolov4.md
+++ b/docs/extension_guide/tensorflow-yolov4.md
@@ -1,8 +1,8 @@
# Tutorial
-[tensorflow-yolov4](https://github.com/hhk7734/tensorflow-yolov4), 请参考文档,安装响应依赖。
+[tensorflow-yolov4](https://github.com/hhk7734/tensorflow-yolov4), 请参考文档,安装相应依赖。
-接入方法参考[使用4 行 Pyhon 代码扩展 Scratch](https://blog.just4fun.site/post/%E5%B0%91%E5%84%BF%E7%BC%96%E7%A8%8B/4-line-python-code-as-scratch-ext/)
+接入方法参考[Python对象的连接器:EIM 插件](/project_tutorial/eim_pt/)
使用前请将[coco.names](https://github.com/hhk7734/tensorflow-yolov4/tree/master/test/dataset) 和 [yolov4-tiny.weights](https://drive.google.com/file/d/1GJwGiR7rizY_19c_czuLN8p31BwkhWY5/view?usp=sharing) 下载到对应目录。
diff --git a/docs/extension_guide/tensorflow.md b/docs/extension_guide/tensorflow.md
index a11e055..a43d1fc 100644
--- a/docs/extension_guide/tensorflow.md
+++ b/docs/extension_guide/tensorflow.md
@@ -1,2 +1,6 @@
# Tensorflow
-参考[运行在树莓派中的 codelab-adapter tensorflow 插件](https://blog.just4fun.site/adapter-tensorflow.html)。
+
+
+
+
+目前北京王府国际学校在使用的 codelab-adapter-4_4_1-AI-alpha 内置 Tensorflow, 细节参考[定制与分发](https://adapter.codelab.club/dev_guide/%E5%AE%9A%E5%88%B6%E4%B8%8E%E5%88%86%E5%8F%91/)
\ No newline at end of file
diff --git a/docs/extension_guide/tuio.md b/docs/extension_guide/tuio.md
new file mode 100644
index 0000000..6905ae6
--- /dev/null
+++ b/docs/extension_guide/tuio.md
@@ -0,0 +1,25 @@
+# 激光雷达
+
+激光雷达积木是一种在Scratch舞台上创建交互式触摸作品的积木块,将房间变成 Scratch 舞台区,你可以使用身体与Scratch进行互动!
+## 使用说明
+使用前,我们需要准备好激光雷达和投影仪并进行校准,校准之后的投影区域与舞台区域坐标保持一致,x、y坐标与Scratch中的x、y坐标概念相同,也是触点中最常用的数据。当你站在Scratch舞台上时,下面的积木块可以让角色跟随你的脚移动。
+
+积木中触点的概念类似于Scratch中的鼠标指针,与鼠标指针不同的是,激光雷达积木可以让Scratch舞台区具有多点触控的能力,并且都是由你编程实现的!使用时,一种好的做法是将触点的数据映射为Scratch中的一个角色,这个角色可以得到Scratch中其他积木块的能力,如碰撞侦测。如果不想在舞台上看到角色,可以让角色在舞台上透明。
+
+
+当触点数据包含了多个触点时,使用触点列表积木可以看到全部的触点,最新触点积木会看到最新加入的触点。
+如果只想关注触点列表中的某一个触点,我们也给出了根据下标获得触点的积木。
+
+
+触点拥有自己的生命,如果使用Scratch中的克隆来完成多点触控的代码,每一个触点都是一个克隆体,当触点不再处于活动状态时,最好删除这个克隆体。
+
+
+!!! tips
+ 多点触控的代码虽然可以复用,但写法并不是唯一的。想象一下你是作品的交互设计师,可以让代码去适应你独特的交互逻辑。
+
+
+
+## Demo视频
+[交互激光雷达](https://adapter.codelab.club/extension_guide/lidar/)
+## 更多作品
+[雷达互动作品工作室](https://create.codelab.club/studios/378)
diff --git a/docs/extension_guide/vector.md b/docs/extension_guide/vector.md
index dd5248b..8ec63f6 100644
--- a/docs/extension_guide/vector.md
+++ b/docs/extension_guide/vector.md
@@ -4,7 +4,6 @@
> Anki is a company whose products always seem to delight.
-We love [Cozmo](https://www.anki.com/en-us/cozmo), and [Vector](https://www.anki.com/en-us/vector).
[Codelab Adapter](https://adapterv2.codelab.club) is a software that connect Scratch 3.0 to the open-source hardware, IoT and AI.
@@ -38,6 +37,9 @@ windows user: `python -m pip install codelab_adapter_client --upgrade --user`
Follow Vector official tutorial: [Initial Setup](https://developer.anki.com/vector/docs/initial.html)
+!!! 提醒
+ 如果 Vector 的 IP发生了变化(诸如将Vector 带入新的 wifi 环境),不需要重新认证(python3 -m anki_vector.configure), 只需要修本地改配置文件即可(第一次认证留下的), 配置文件为: `~/.anki_vector/sdk_config.ini`
+
If the following code (`hello_world.py`) runs smoothly, go to the next step.
```python
@@ -65,7 +67,7 @@ if __name__ == "__main__":
### Download Codelab Adapter
-Download Codelab Adapter
+Download Codelab Adapter
run it
diff --git a/docs/extension_guide/wechat.md b/docs/extension_guide/wechat.md
index df861d8..52cdff9 100644
--- a/docs/extension_guide/wechat.md
+++ b/docs/extension_guide/wechat.md
@@ -1,5 +1,11 @@
# Tutorial
+## 介绍
+该插件使用 [ItChat](https://github.com/littlecodersh/ItChat) 接入微信, ItChat 基于网页微信接口。
+
+!!! 提醒
+ 大量用户无法使用网页微信。可以通过扫码:[网页微信](https://wx.qq.com/) 看看自己能否登陆腾讯官方的网页微信,如果你无法登陆网页微信(腾讯对你的账号权限做了限制),则无法使用该插件。
+
## 依赖
{!utils/dependence.md!}
diff --git a/docs/extension_guide/yeelight.md b/docs/extension_guide/yeelight.md
new file mode 100644
index 0000000..235147f
--- /dev/null
+++ b/docs/extension_guide/yeelight.md
@@ -0,0 +1,16 @@
+# yeelight
+
+使用 Adapter 直接驱动 yeelight,不需要 Home Assistant/LonganHub
+
+插件源码: [node_yeelight.py](https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/nodes_v3/node_yeelight.py)
+
+# Scratch Demo
+
+* [Scratch EIM demo](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/yeelight-eim-demo.sb3)
+ * [社区版](https://create.codelab.club/projects/8097/)
+
+# 文档
+
+[yeelight](https://yeelight.readthedocs.io/en/latest/)
+
+yeelight 速率限制为每分钟60个。如果你想解除限制,则需要使用: Music mode : `bulb.start_music()`
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/extension_Aqara_scene.py b/docs/extensions_nodes_mirrors/extension_Aqara_scene.py
index aa3ce93..cdc7ed3 100644
--- a/docs/extensions_nodes_mirrors/extension_Aqara_scene.py
+++ b/docs/extensions_nodes_mirrors/extension_Aqara_scene.py
@@ -1,5 +1,4 @@
import hashlib
-import subprocess
import sys
import time
import webbrowser
@@ -7,7 +6,6 @@
import requests
from codelab_adapter.core_extension import Extension
-from codelab_adapter.settings import TOKEN
from codelab_adapter.utils import (open_path_in_system_file_manager,
verify_token)
@@ -80,7 +78,6 @@ def run_python_code(self, code):
output = e
return output
- @verify_token
def extension_message_handle(self, topic, payload):
'''
所有可能运行代码的地方,都加上验证,确认payload中代码风险和token
diff --git a/docs/extensions_nodes_mirrors/extension_RoboMaster.py b/docs/extensions_nodes_mirrors/extension_RoboMaster.py
index 6522452..ebdbef2 100644
--- a/docs/extensions_nodes_mirrors/extension_RoboMaster.py
+++ b/docs/extensions_nodes_mirrors/extension_RoboMaster.py
@@ -5,7 +5,6 @@
from codelab_adapter.core_extension import Extension
-
class RoboMasterExtension(Extension):
NODE_ID = "eim/extension_RoboMaster"
HELP_URL = "http://adapter.codelab.club/extension_guide/RoboMaster/"
@@ -25,11 +24,11 @@ def get_robot_ip(self):
try:
ip_sock.settimeout(3)
# wait...
- ip_str = ip_sock.recvfrom(1024) # block
+ ip_str = ip_sock.recvfrom(1024) # block
host = ip_str[-1][0]
return host
except Exception as e:
- self.pub_notification(str(e),type="ERROR")
+ self.pub_notification(str(e), type="ERROR")
raise e
def create_command_socket(self):
@@ -52,10 +51,10 @@ def run(self):
# 默认建立连接
connect_msg = "command;"
command_socket.send(connect_msg.encode('utf-8'))
- buf = command_socket.recv(1024) # todo: timeout
+ buf = command_socket.recv(1024) # todo: timeout
# todo 开启事件上报, 默认开启,使用一个新的socket线程,接收事件。使用bucket token
self.logger.info(f"connect: {buf}")
- self.pub_notification("Device(RoboMaster) Connected!", type="SUCCESS")
+ self.pub_notification("RoboMasterEP 已连接", type="SUCCESS")
while self._running:
# wait for the command for the client(scratch/web app)
time.sleep(0.05)
@@ -63,11 +62,11 @@ def run(self):
payload = self.q.get()
msg = payload["content"]
# send the command to the robot
- command_socket.send(msg.encode('utf-8')) # todo: noblock
+ command_socket.send(msg.encode('utf-8')) # todo: noblock
try:
# wait for the reply
- buf = command_socket.recv(1024) # todo: timeout
+ buf = command_socket.recv(1024) # todo: timeout
output = buf.decode('utf-8')
payload["content"] = str(output)
message = {"payload": payload}
diff --git a/docs/extensions_nodes_mirrors/extension_Siri.py b/docs/extensions_nodes_mirrors/extension_Siri.py
index 4304307..646c1bf 100644
--- a/docs/extensions_nodes_mirrors/extension_Siri.py
+++ b/docs/extensions_nodes_mirrors/extension_Siri.py
@@ -9,12 +9,24 @@
import queue
import requests
-import bottle
-from bottle import route, run, template, view, request
from codelab_adapter.core_extension import Extension
-from codelab_adapter.utils import threaded, get_local_ip
-from codelab_adapter_client.utils import get_adapter_home_path
+from codelab_adapter.utils import threaded, is_win
+from codelab_adapter_client.utils import get_adapter_home_path, get_local_ip
+
+# windows pythonw
+if is_win():
+ import io
+ from contextlib import redirect_stdout, redirect_stderr
+ stdout = io.StringIO()
+ stderr = io.StringIO()
+ with redirect_stdout(stdout), redirect_stderr(stderr):
+ import bottle # flask fix windows sys.stdout.write, itchat(node)
+ from bottle import route, run, template, view, request
+else:
+ import bottle # flask fix windows sys.stdout.write, itchat(node)
+ from bottle import route, run, template, view, request
+
# html 文件所在目录
PORT = 18081
message_queue = queue.Queue()
@@ -84,7 +96,7 @@ def __init__(self, **kwargs):
@threaded
def _run_webserver_as_thread(self):
- try:
+ try:
run(host='0.0.0.0', port=self.port)
except OSError as e:
self.logger.warning(str(e))
diff --git a/docs/extensions_nodes_mirrors/extension_arduino_uno.py b/docs/extensions_nodes_mirrors/extension_arduino_uno.py
index ad2ae56..c622f8c 100644
--- a/docs/extensions_nodes_mirrors/extension_arduino_uno.py
+++ b/docs/extensions_nodes_mirrors/extension_arduino_uno.py
@@ -454,7 +454,7 @@ def run(self):
try:
self.event_loop.create_task(
- self.pub_notification(f'Arduino UNO Connected!',
+ self.pub_notification('Arduino UNO 已连接',
type="SUCCESS"))
self.event_loop.run_until_complete(self.main())
self.logger.debug("arduino thread end")
diff --git a/docs/extensions_nodes_mirrors/extension_http_eim.py b/docs/extensions_nodes_mirrors/extension_http_eim.py
index 7a17a94..a8432f2 100644
--- a/docs/extensions_nodes_mirrors/extension_http_eim.py
+++ b/docs/extensions_nodes_mirrors/extension_http_eim.py
@@ -13,8 +13,8 @@
from bottle import route, run, template, view, request
from codelab_adapter.core_extension import Extension
-from codelab_adapter.utils import threaded, get_local_ip
-from codelab_adapter_client.utils import get_adapter_home_path
+from codelab_adapter.utils import threaded
+from codelab_adapter_client.utils import get_adapter_home_path, get_local_ip
# html 文件所在目录
PORT = 18082
diff --git a/docs/extensions_nodes_mirrors/extension_jupyterlab.py b/docs/extensions_nodes_mirrors/extension_jupyterlab.py
index 65a281f..79801ed 100644
--- a/docs/extensions_nodes_mirrors/extension_jupyterlab.py
+++ b/docs/extensions_nodes_mirrors/extension_jupyterlab.py
@@ -1,16 +1,13 @@
-import os
-import pathlib
-import platform
-import subprocess
-import sys
import time
-import signal
+
+from codelab_adapter.jupyterlab_manage import jupyterlabProxy
from codelab_adapter.core_extension import Extension
-from codelab_adapter.launcher import launch_proc # just like subprocess.Popen, but better cross-platform support
from codelab_adapter.local_env import EnvManage
-from codelab_adapter.utils import get_html_message_for_no_local_python
-from codelab_adapter_client.utils import get_python3_path, install_requirement, get_adapter_home_path
+from codelab_adapter.utils import get_python3_path, get_html_message_for_no_local_python, is_linux
+from codelab_adapter_client.utils import install_requirement, get_adapter_home_path
+
+# https://github.com/jupyterlab/jupyterlab/blob/36037151f0ddddf84715d3e693f3f02dd483960d/jupyterlab/labapp.py#L409 Jupyter 的参数
class JupyterlabExtension(Extension):
@@ -31,55 +28,45 @@ def __init__(self, **kwargs):
self.jupyter_proc = None
def _install_requirement(self): # to install jupyterlab
- self.pub_notification(f"jupyterlab is being installed...")
+ self.pub_notification("正在安装 JupyterLab...")
output = install_requirement(self.REQUIREMENTS)
if output == 0:
- self.pub_notification("jupyterlab installed!")
+ self.pub_notification("JupyterLab 安装完成")
self.env_manage.set_env(None) # update env
- def run_jupyterlab(self):
- cmd = [
- self.python_path, "-m", "jupyterlab", "--notebook-dir",
- str(self.adapter_home_path)
- ]
- try:
- self.jupyter_proc = launch_proc(
- cmd,
- # shell=True,
- logger=self.logger,
- stdin=subprocess.PIPE,
- stdout=subprocess.PIPE,
- stderr=subprocess.PIPE) # work with windows
- except Exception as e:
- self.pub_notification(str(e), type="ERROR")
-
def run(self):
env = self.env_manage.get_env() # the local env, todo: docs
- if not env["local Python3"].get("path"):
- html_message = get_html_message_for_no_local_python()
- self.pub_html_notification(html_message)
- return
+ # linux (lite version)
+ if is_linux():
+ '''
+ if not env["local Python3"].get("path"):
+ html_message = get_html_message_for_no_local_python()
+ self.pub_html_notification(html_message)
+ return
+ '''
- if not env["treasure box"].get("jupyterlab"):
- self._install_requirement()
- self.pub_notification("ready to open jupyterlab...")
- self.run_jupyterlab()
+ # if not env["treasure box"].get("jupyterlab"):
+ pass
+ # self._install_requirement()
+ # self.run_jupyterlab()
+ self.pub_notification("正在启动 jupyterlab...")
+ self.jupyter_proc = jupyterlabProxy().run_jupyterlab()
while self._running:
time.sleep(1)
- def terminate(self):
+ def terminate(self, **kwargs):
'''
stop thread
'''
if self._running:
- self.pub_notification("try to stop jupyterlab")
+ self.pub_notification("正在停止 JupyterLab")
if self.jupyter_proc:
# fuck Windows! 🖕️
- self.jupyter_proc.kill()
+ self.jupyter_proc.terminate()
# os.killpg(os.getpgid(self.jupyter_proc.pid), signal.SIGTERM)
- self.jupyter_proc.wait()
+ self.jupyter_proc.join()
# 启动 node 的东西 ,使用 psutil? delegator.py?
- self.pub_notification("jupyterlab stopped")
+ self.pub_notification("JupyterLab 已停止")
time.sleep(0.1)
super().terminate()
diff --git a/docs/extensions_nodes_mirrors/extension_microbit_radio.py b/docs/extensions_nodes_mirrors/extension_microbit_radio.py
index b18ac7b..9c616a4 100644
--- a/docs/extensions_nodes_mirrors/extension_microbit_radio.py
+++ b/docs/extensions_nodes_mirrors/extension_microbit_radio.py
@@ -1,12 +1,177 @@
import time
+import serial
+import json
+from collections import deque
+import threading
+from codelab_adapter.utils import list_microbit, flash_makecode_file
+from codelab_adapter_client.utils import get_adapter_home_path, threaded
+
+# from extension_usb_microbit import MicrobitHelper # extensions/extension_usb_microbit.py
from codelab_adapter.core_extension import Extension
-from codelab_adapter.microbit_helper import MicrobitRadioHelper
+from codelab_adapter_client.thing import AdapterThing
+
+# from codelab_adapter.microbit_helper import MicrobitRadioHelper
'''
-todo 错误信息报告 通知
+todo
+ serial 锁
+ 队列/缓冲
+ 数字
+
+bug
+ 为何第一次连接 读不到versions
+
+fifo = deque()
+fifo.append(1) # deque([1])
+fifo.append(2) # deque([1, 2])
+2 in fifo # true
+fifo.popleft() # deque([2])
'''
+class ThingProxy(AdapterThing):
+ def __init__(self, node_instance):
+ super().__init__(thing_name="micro:bit-radio",
+ node_instance=node_instance)
+ # 定长 https://stackoverflow.com/questions/1931589/python-datatype-for-a-fixed-length-fifo
+ # The append() and popleft() methods are both atomic.
+ # self.write_fifo_queue = deque() # to microbit
+ # self.read_fifo_queue = deque() # from microbit
+ self.lock = threading.Lock()
+
+ def list(self, timeout=5) -> list:
+ microbit_ports = list_microbit() # return
+ if not microbit_ports:
+ self.node_instance.logger.error("未发现 micro:bit")
+ self.node_instance.pub_notification("未发现 micro:bit", type="ERROR")
+
+ return [str(i[0]) for i in microbit_ports]
+
+ # def connect(self, ip, timeout=5):
+ def connect(self, id, **kwargs):
+ self.port = id
+ # self.node_instance.logger.debug(f"args: {kwargs}")
+ if not kwargs.get("baudrate", None):
+ kwargs["baudrate"] = 115200
+ # if not kwargs.get("timeout", None):
+ timeout = kwargs["timeout"] # client输入
+ kwargs["timeout"] = 0.5 # 串口超时时间
+ ser = serial.Serial(self.port, **kwargs)
+
+ firmware_path = str(get_adapter_home_path() / "src" /
+ "makecode_radio_adapter.hex")
+ t1 = time.time()
+ # time.sleep(0.1)
+ while self.node_instance._running:
+ if time.time() - t1 >= timeout / 2:
+ # 超时没收到version信息, 可能是第一次烧录
+ self.node_instance.logger.error("get version timeout")
+ ser.close()
+ self.node_instance.pub_notification("正在刷入固件...", type="INFO")
+ flash_makecode_file(firmware_path)
+ time.sleep(10)
+ return
+ ser.write(b"version\n") # 没写进去,microbit没有反应
+ data = ser.readline() # timeout
+ if data:
+ self.node_instance.logger.debug(f"version query reply: {data}")
+ data = data.decode().strip()
+ if data.startswith("version_"):
+ version = data.split('version_')[-1]
+ self.node_instance.logger.debug(
+ f"makecode radio firmware -> {version}")
+ if version >= "0.5": # todo 0.5 set radio_03 其他不要动,固件变了
+ self.is_connected = True # 连接成功
+ self.thing = ser
+ if self.thing.name:
+ self.node_instance.pub_notification(
+ "micro:bit 已连接", type="SUCCESS")
+ self.run_task_forever()
+ return "ok"
+ else:
+ self.thing.close()
+ self.node_instance.pub_notification("正在刷入固件...",
+ type="INFO")
+ flash_makecode_file(firmware_path)
+ time.sleep(10)
+ # self.node_instance.pub_notification(self.flash_finished_notification, type="SUCCESS")
+ return # 只有串口数据是 version_xx才退出循环
+
+ def status(self, **kwargs) -> bool:
+ pass
+
+ def disconnect(self):
+ # 不要try,暴露问题
+ self.is_connected = False # todo 不需要这个,使用thing 是否存在即可
+ try:
+ self.thing.close()
+ except Exception:
+ pass
+ self.thing = None
+ self.node_instance.pub_notification(f'{self.node_instance.NODE_ID} 已断开', type="WARNING") # 切断插件?
+
+ # 业务
+ def write(self, content):
+ if self.is_connected:
+ self.lock.acquire() # todo queue? 好像某些 windows 会导致 microbit死掉 好像是发的东西不对,在 microbit 观察下
+ self.thing.write(content.encode('utf-8')) # todo 线程安全
+ # time.sleep(0.1) # 避免遗漏消息
+ self.thing.flush()
+ # 前端使用等待的
+ self.lock.release()
+ return "ok"
+
+
+ def uart_helper(self):
+ '''
+ 后台任务
+ 放入缓冲区
+ 1000个长度
+ 写入任务
+ 在同个循环里,避免跨线程
+ 使用queue跨线程
+
+ return
+ microbit output
+ '''
+ if self.is_connected:
+ try:
+ # 写入队列和读出队列
+ # write from queue
+ data = self.thing.readline() # timeout?
+ self.node_instance.logger.debug(f"readline: {data}")
+ if data:
+ data_str = data.decode()
+ return data_str.strip()
+ except Exception as e:
+ # self.is_connected = False
+ # self.thing = None
+ self.node_instance.logger.error(e)
+ self.node_instance.pub_notification(str(e), type="ERROR")
+ time.sleep(0.1) # 提示设备未连接
+ # 强行拔掉后,自行退出
+ self.node_instance.terminate() # 需要插件退出吗?
+
+ @threaded
+ def run_task_forever(self):
+ while self.node_instance._running:
+ if self.is_connected:
+ # microbit node -> microbit adapter
+ response_from_microbit = self.uart_helper()
+ if response_from_microbit:
+ if response_from_microbit.startswith('version_'):
+ # version信息, 状态机 todo
+ pass
+ else:
+ message = self.node_instance.message_template()
+ message["payload"]["content"] = response_from_microbit
+ # 来自radio的消息,与控制消息区分开
+ message["payload"]["message_type"] = 'radio_message'
+ self.node_instance.publish(message)
+ else:
+ break
+
+
class MicrobitRadioProxy(Extension):
'''
use TokenBucket to limit message rate(pub) https://github.com/CodeLabClub/codelab_adapter_client_python/blob/master/codelab_adapter_client/utils.py#L25
@@ -15,22 +180,29 @@ class MicrobitRadioProxy(Extension):
NODE_ID = "eim/extension_microbit_radio"
HELP_URL = "http://adapter.codelab.club/extension_guide/microbit_radio/"
WEIGHT = 98
- VERSION = "1.1" # 简化makecode对字符串的处理,移除\r
+ VERSION = "2.0.0" # 简化makecode对字符串的处理,移除\r
DESCRIPTION = "Microbit radio 信号中转站"
def __init__(self, **kwargs): # kwargs 接受启动参数
super().__init__(
- bucket_token=200, # 默认是100条 hub模式消息量大
+ bucket_token=100, # 默认是100条 hub模式消息量大
bucket_fill_rate=100,
**kwargs)
- self.microbitHelper = MicrobitRadioHelper(self)
+ self.thing = ThingProxy(self)
+ # self.microbitHelper = MicrobitRadioHelper(self)
def run_python_code(self, code):
# fork from python extension
try:
- output = eval(code, {"__builtins__": None}, {
- "microbitHelper": self.microbitHelper,
- })
+ output = eval(
+ code,
+ {"__builtins__": None},
+ {
+ "thing": self.thing, # 直接调用方法
+ "connect": self.thing.connect,
+ "disconnect": self.thing.disconnect,
+ "list": self.thing.list,
+ })
except Exception as e:
output = str(e)
# 也作为提醒
@@ -39,32 +211,29 @@ def run_python_code(self, code):
def extension_message_handle(self, topic, payload):
'''
- test: codelab-message-pub -j '{"topic":"scratch/extensions/command","payload":{"node_id":"eim/extension_microbit_radio", "content":"microbitHelper.write(\"c\")"}}'
+ test: codelab-message-pub -j '{"topic":"scratch/extensions/command","payload":{"node_id":"eim/extension_microbit_radio", "content":"thing.write(\"c\")"}}'
'''
self.logger.info(f'python code: {payload["content"]}')
- message_id = payload.get("message_id")
+ # message_id = payload.get("message_id")
python_code = payload["content"]
- if "microbitHelper" in python_code:
- output = self.run_python_code(python_code)
- payload["content"] = output
- message = {"payload": payload} # 无论是否有message_id都返回
- self.publish(message)
+ output = self.run_python_code(python_code)
+ try:
+ output = json.dumps(output)
+ except Exception:
+ output = str(output)
+ payload["content"] = output
+ message = {"payload": payload}
+ self.publish(message)
def run(self):
- while self._running:
- if self.microbitHelper.ser:
- # node -> microbit adapter
- response_from_microbit = self.microbitHelper.get_response_from_microbit(
- )
- # print(response_from_microbit)
- if response_from_microbit:
- print(response_from_microbit)
- message = self.message_template()
- message["payload"]["content"] = response_from_microbit
- self.publish(message)
- else:
- time.sleep(0.5)
- # 广播不在线
+ time.sleep(0.1)
+
+ def terminate(self, **kwargs):
+ try:
+ self.thing.disconnect()
+ except Exception:
+ pass
+ super().terminate(**kwargs)
export = MicrobitRadioProxy
diff --git a/docs/extensions_nodes_mirrors/extension_mqtt_adapter.py b/docs/extensions_nodes_mirrors/extension_mqtt_adapter.py
index 99d4f4f..fb195e2 100644
--- a/docs/extensions_nodes_mirrors/extension_mqtt_adapter.py
+++ b/docs/extensions_nodes_mirrors/extension_mqtt_adapter.py
@@ -45,11 +45,6 @@ def __init__(self, **kwargs):
self.client.connect(self.mqtt_addr, self.mqtt_port, 60)
self.client.loop_start() # as thread
- def exit_message_handle(self, topic, payload):
- # stop mqtt client
- self.client.loop_stop()
- self.terminate()
-
def extension_message_handle(self, topic, payload):
'''
scratch eim -> mqtt
@@ -91,5 +86,8 @@ def run(self):
# to publish mqtt message
time.sleep(0.1)
+ def terminate(self, **kwargs):
+ self.client.loop_stop()
+ super().terminate(**kwargs)
export = MqttAdapterExtension
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/extension_python.py b/docs/extensions_nodes_mirrors/extension_python.py
index ea15e57..8c6ab9e 100644
--- a/docs/extensions_nodes_mirrors/extension_python.py
+++ b/docs/extensions_nodes_mirrors/extension_python.py
@@ -1,10 +1,3 @@
-import sys
-import time
-import subprocess
-import webbrowser
-from codelab_adapter.core_extension import Extension
-from codelab_adapter.utils import verify_token, open_path_in_system_file_manager
-from codelab_adapter.settings import TOKEN
'''
当前插件只允许运行表达式
如果你希望执行任意python代码,请使用: https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v2/extension_python_kernel_exec.py,注意风险
@@ -12,10 +5,16 @@
也可以在Scratch EIM插件中运行Python代码
'''
+import time
+import webbrowser
+import requests
+from codelab_adapter.core_extension import Extension
+from codelab_adapter.utils import verify_token, open_path_in_system_file_manager
+
class PyHelper:
- def open_url(https://github.com/self,%20url):
- webbrowser.open(url)
+ def open_url(https://github.com/self,%20url,%20**kwargs):
+ webbrowser.open(url, **kwargs)
def open(self, path):
open_path_in_system_file_manager(path)
@@ -29,7 +28,7 @@ class PythonKernelExtension(Extension):
NODE_ID = "eim/extension_python"
HELP_URL = "http://adapter.codelab.club/extension_guide/extension_python_kernel/"
WEIGHT = 95
- VERSION = "1.0" # extension version
+ VERSION = "1.1" # extension version
DESCRIPTION = "Python eval"
def __init__(self, **kwargs):
@@ -37,34 +36,27 @@ def __init__(self, **kwargs):
self.PyHelper = PyHelper()
def run_python_code(self, code):
- '''
- mode
- 1 exec
- 2 eval
- 3 pass
- '''
try:
- # 出于安全考虑, 放弃使用exec,如果需要,可以自行下载exec版本
# eval(expression, globals=None, locals=None)
- # 如果只是调用(插件指责)可以使用json-rpc
output = eval(code, {"__builtins__": None}, {
"PyHelper": self.PyHelper,
+ "requests": requests,
})
except Exception as e:
- output = e
+ output = str(e)
return output
- @verify_token
+ # @verify_token
def extension_message_handle(self, topic, payload):
- '''
- 所有可能运行代码的地方,都加上验证,确认payload中代码风险和token
- '''
self.logger.info(f'python code: {payload["content"]}')
- message_id = payload.get("message_id")
python_code = payload["content"]
output = self.run_python_code(python_code)
- payload["content"] = str(output)
- message = {"payload": payload} # 无论是否有message_id都返回
+ try:
+ output = str(output) # 不要传递复杂结构
+ except Exception as e:
+ output = str(e)
+ payload["content"] = output
+ message = {"payload": payload}
self.publish(message)
def run(self):
diff --git a/docs/extensions_nodes_mirrors/extension_socket_server.py b/docs/extensions_nodes_mirrors/extension_socket_server.py
new file mode 100644
index 0000000..ebedc20
--- /dev/null
+++ b/docs/extensions_nodes_mirrors/extension_socket_server.py
@@ -0,0 +1,67 @@
+import time
+import re
+from loguru import logger
+from codelab_adapter_client.utils import send_simple_message
+from codelab_adapter.core_extension import Extension
+from socketserver import BaseRequestHandler, TCPServer
+
+
+class ScratchEchoHandler(BaseRequestHandler):
+
+ def handle(self):
+ print('Got connection from', self.client_address)
+ while True:
+ msg = self.request.recv(1024)
+ print(f'msg:${msg}')
+ if not msg:
+ break
+ else:
+ logger.debug(f'socket request message: {msg}')
+ # to adpaters
+ message_decode = msg.decode()
+ if "broadcast" in message_decode:
+ content = re.search(r'\"(.*?)\"', message_decode.split("broadcast")[-1]).groups()[0]
+ send_simple_message(content)
+ # if content == "exit":
+ # self.server.shutdown()
+ # self.server.server_close()
+ self.request.send(msg)
+
+
+class SocketServerExtension(Extension):
+ '''
+ Socket Server
+ 最初用于实现与 Etoys 互操作: https://blog.just4fun.site/post/%E5%B0%91%E5%84%BF%E7%BC%96%E7%A8%8B/etoys-learning-note/
+
+ socket client -> Scratch
+ '''
+ NODE_ID = "eim/extension_socket_server"
+ HELP_URL = "https://adapter.codelab.club/extension_guide/socket_server/" # Documentation page for the project
+ VERSION = "1.0" # extension version
+ DESCRIPTION = "Socket Server"
+ ICON_URL = ""
+ REQUIRES_ADAPTER = "" # ">= 3.2.0"
+
+ def __init__(self, **kwargs):
+ super().__init__(**kwargs)
+ self.port = 42001
+ self.address = '127.0.0.1'
+ self.socket_server = TCPServer((self.address,self.port), ScratchEchoHandler)
+
+
+ def extension_message_handle(self, topic, payload):
+ pass
+
+ def run(self):
+ # 高频消息使用 osc
+ self.socket_server.serve_forever()
+
+ def terminate(self, **kwargs):
+ self.logger.debug('terminate!')
+ self.socket_server.shutdown() # 无法外部 shutdown
+ self.socket_server.server_close()
+ super().terminate(**kwargs)
+
+
+
+export = SocketServerExtension
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/extension_tello.py b/docs/extensions_nodes_mirrors/extension_tello.py
index 75cf376..3071080 100644
--- a/docs/extensions_nodes_mirrors/extension_tello.py
+++ b/docs/extensions_nodes_mirrors/extension_tello.py
@@ -7,6 +7,8 @@
# import numpy as np
# import libh264decoder
+# todo: 只考虑简单控制
+# 基于 https://github.com/hanyazou/TelloPy
class Tello:
"""Wrapper class to interact with the Tello drone."""
diff --git a/docs/extensions_nodes_mirrors/extension_uart_adapter.py b/docs/extensions_nodes_mirrors/extension_uart_adapter.py
index 64987bf..3311627 100644
--- a/docs/extensions_nodes_mirrors/extension_uart_adapter.py
+++ b/docs/extensions_nodes_mirrors/extension_uart_adapter.py
@@ -38,10 +38,10 @@ def connect(self, port, **kwargs):
def disconnect(self, **kwargs):
if self.ser:
self.ser.close()
- self.extensionInstance.pub_notification("device disconnected!")
+ self.extensionInstance.pub_notification("设备已断开")
return "ok"
else:
- self.extensionInstance.pub_notification("Please connect the device!", type="ERROR")
+ self.extensionInstance.pub_notification("未发现可用设备", type="ERROR")
def list_ports(self):
@@ -69,7 +69,7 @@ def write(self, content):
self.extensionInstance.terminate()
else:
self.extensionInstance.pub_notification(
- "Please connect the device!", type="ERROR")
+ "未发现可用设备", type="ERROR")
self.extensionInstance.terminate()
def readline(self):
@@ -85,7 +85,7 @@ def readline(self):
self.extensionInstance.terminate()
else:
self.extensionInstance.pub_notification(
- "Please connect the device!", type="ERROR")
+ "未发现可用设备", type="ERROR")
self.extensionInstance.terminate()
diff --git a/docs/extensions_nodes_mirrors/extension_usb_microbit.py b/docs/extensions_nodes_mirrors/extension_usb_microbit.py
index 724ef81..f2f4bde 100644
--- a/docs/extensions_nodes_mirrors/extension_usb_microbit.py
+++ b/docs/extensions_nodes_mirrors/extension_usb_microbit.py
@@ -1,18 +1,214 @@
-import queue
import time
+import serial
+import json
-from codelab_adapter.microbit_helper import UsbMicrobitHelper
+from codelab_adapter.utils import list_microbit, flash_makecode_file
+from codelab_adapter_client.utils import get_adapter_home_path, threaded
+
+# from extension_usb_microbit import MicrobitHelper # extensions/extension_usb_microbit.py
from codelab_adapter.core_extension import Extension
+from codelab_adapter_client.thing import AdapterThing
+import threading
+
+# from codelab_adapter.microbit_helper import MicrobitRadioHelper
'''
-todo:
- 使用makecode构建固件
- command
- query
- event
+todo
+ serial 锁
+ 队列/缓冲
+ 数字
+
+bug
+ 为何第一次连接 读不到versions
+
+fifo = deque()
+fifo.append(1) # deque([1])
+fifo.append(2) # deque([1, 2])
+2 in fifo # true
+fifo.popleft() # deque([2])
'''
-class UsbMicrobitProxy(Extension):
+class ThingProxy(AdapterThing):
+ def __init__(self, node_instance):
+ super().__init__(thing_name="USB micro:bit",
+ node_instance=node_instance)
+ # 定长 https://stackoverflow.com/questions/1931589/python-datatype-for-a-fixed-length-fifo
+ # The append() and popleft() methods are both atomic.
+ # self.write_fifo_queue = deque() # to microbit
+ # self.read_fifo_queue = deque() # from microbit
+ self.lock = threading.Lock()
+
+ def list(self, timeout=5) -> list:
+ microbit_ports = list_microbit() # return
+ if not microbit_ports:
+ self.node_instance.logger.error("未发现 micro:bit")
+ self.node_instance.pub_notification("未发现 micro:bit", type="ERROR")
+
+ return [str(i[0]) for i in microbit_ports]
+
+ # def connect(self, ip, timeout=5):
+ def connect(self, id, **kwargs):
+ self.port = id
+ # self.node_instance.logger.debug(f"args: {kwargs}")
+ if not kwargs.get("baudrate", None):
+ kwargs["baudrate"] = 115200
+ # if not kwargs.get("timeout", None):
+ timeout = kwargs["timeout"] # client输入
+ kwargs["timeout"] = 1 # 串口超时时间
+ ser = serial.Serial(self.port, **kwargs)
+ self.thing = ser
+ firmware_path = str(get_adapter_home_path() / "src" /
+ "usb_Microbit_firmware_4v1v2.hex")
+
+ t1 = time.time()
+ # time.sleep(0.1)
+ while self.node_instance._running:
+ if time.time() - t1 >= timeout / 2:
+ # 超时没收到version信息, 可能是第一次烧录
+ self.node_instance.logger.error("get version timeout")
+ ser.close()
+ self.node_instance.pub_notification("正在刷入固件...", type="INFO")
+ flash_makecode_file(firmware_path) # todo flash_hex_file
+ time.sleep(10)
+ return
+ # self.send_command(payload="__version__", msgid="query version")
+ self.send_command()
+ # ser.write(b"version\n") # 没写进去,microbit没有反应
+ data = self.uart_helper() # timeout, 为何read没东西? 第一次
+ self.node_instance.logger.debug(f"version query reply: {data}")
+ if data:
+ if data.get("version"):
+ self.node_instance.logger.debug(
+ f"usb microbit firmware -> {data['version']}")
+ version = data.get("version")
+ if version >= "0.4": # todo 0.5 set radio_03 其他不要动,固件变了
+ self.is_connected = True # 连接成功
+ self.thing = ser
+ self.node_instance.pub_notification("micro:bit 已连接", type="SUCCESS")
+ self.run_task_forever()
+ return "ok"
+ else:
+ self.thing.close()
+ self.node_instance.pub_notification("正在刷入固件...",
+ type="INFO")
+ flash_makecode_file(firmware_path)
+ time.sleep(10)
+ # self.node_instance.pub_notification(self.flash_finished_notification, type="SUCCESS")
+ return # 只有串口数据是 version_xx才退出循环
+
+ def status(self, **kwargs) -> bool:
+ pass
+
+ def disconnect(self):
+ self.is_connected = False
+ try:
+ self.thing.close()
+ except Exception:
+ pass
+ self.thing = None
+ self.node_instance.pub_notification(f'{self.node_instance.NODE_ID} 已断开', type="WARNING")
+
+ # 业务代码
+ def write(self, content):
+ if self.is_connected:
+ self.thing.write(content.encode('utf-8')) # todo 线程安全
+ return "ok"
+
+ def _send_microbit_messge(self, data):
+ message = self.node_instance.message_template()
+ msgid = data.get("msgid")
+ message["payload"]["message_id"] = msgid
+
+ output = data.get("output")
+ if output:
+ # 正常运行了请求的代码
+ message["payload"]["content"] = output
+ self.node_instance.publish(message)
+
+ # and sensor
+ message["payload"]["message_id"] = -1
+ message["payload"]["content"] = data["payload"]
+ self.node_instance.publish(message)
+ else:
+ message["payload"]["content"] = data["payload"]
+ self.node_instance.publish(message)
+
+ def uart_helper(self):
+ '''
+ 后台任务
+ 放入缓冲区
+ 1000个长度
+ 写入任务
+ 在同个循环里,避免跨线程
+ 使用queue跨线程
+
+ return
+ microbit output
+ '''
+ try:
+ data = self.thing.readline()
+ if data:
+ data = data.decode()
+ try:
+ data = eval(data) # todo, 来自 Microbit的数据 暂无安全问题
+ except (ValueError, SyntaxError) as e:
+ # raise e
+ self.node_instance.logger.error(f"{e}: {data}")
+ else:
+ return data
+ except UnicodeDecodeError as e:
+ self.node_instance.logger.error(e)
+ except serial.serialutil.SerialException:
+ self.node_instance.pub_notification("micro:bit 连接异常", type="WARNING")
+ time.sleep(3)
+ except Exception as e:
+ self.node_instance.logger.error(e)
+ self.node_instance.pub_notification(str(e), type="ERROR")
+ # self.node_instance.logger.exception("what!")
+ time.sleep(3)
+
+ @threaded
+ def run_task_forever(self):
+ while self.node_instance._running:
+ if self.is_connected:
+ # microbit node -> microbit adapter
+ # rate = 20
+ # time.sleep(1 / rate)
+ self.send_command()
+ response_from_microbit = self.uart_helper()
+ self.node_instance.logger.debug(f'read from microbit: {response_from_microbit}')
+ if not response_from_microbit:
+ continue
+ if response_from_microbit:
+ # if response_from_microbit.startswith('version_'):
+ '''
+ version = response_from_microbit.get("version")
+ if version and version >= "0.4":
+ # version信息, 状态机 todo
+ continue
+ '''
+ self._send_microbit_messge(response_from_microbit)
+ else:
+ break
+
+ def send_command(self, payload="0", msgid=-1):
+ '''
+ payload content
+ todo message id 对应
+ '''
+ self.lock.acquire()
+ rate = 10
+ time.sleep(1 / rate)
+ scratch3_message = {"msgid": msgid, "payload": payload}
+
+ scratch3_message = json.dumps(scratch3_message) + "\r\n"
+ scratch3_message_bytes = scratch3_message.encode('utf-8')
+ self.node_instance.logger.debug(f'send to microbit: {scratch3_message_bytes}')
+ self.thing.write(scratch3_message_bytes)
+ self.lock.release()
+
+
+class MicrobitExtension(Extension):
'''
use TokenBucket to limit message rate(pub) https://github.com/CodeLabClub/codelab_adapter_client_python/blob/master/codelab_adapter_client/utils.py#L25
'''
@@ -20,61 +216,68 @@ class UsbMicrobitProxy(Extension):
NODE_ID = "eim/extension_usb_microbit"
HELP_URL = "http://adapter.codelab.club/extension_guide/microbit/"
WEIGHT = 99
+ VERSION = "2.0.0"
DESCRIPTION = "使用 Microbit, 为物理世界编程"
- def __init__(self, bucket_token=20, bucket_fill_rate=10, **kwargs):
- super().__init__(bucket_token=bucket_token,
- bucket_fill_rate=bucket_fill_rate, **kwargs)
- self.microbitHelper = UsbMicrobitHelper(self)
- self.q = queue.Queue()
+ def __init__(self, **kwargs): # kwargs 接受启动参数
+ super().__init__(
+ bucket_token=100, # 默认是100条 hub模式消息量大
+ bucket_fill_rate=100,
+ **kwargs)
+ self.thing = ThingProxy(self)
+ # self.microbitHelper = MicrobitRadioHelper(self)
def run_python_code(self, code):
# fork from python extension
try:
- output = eval(code, {"__builtins__": None}, {
- "microbitHelper": self.microbitHelper,
- })
+ output = eval(
+ code,
+ {"__builtins__": None},
+ {
+ "thing": self.thing, # 直接调用方法
+ "connect": self.thing.connect,
+ "disconnect": self.thing.disconnect,
+ "list": self.thing.list,
+ })
except Exception as e:
output = str(e)
+ # 也作为提醒
+ self.pub_notification(output, type="ERROR")
return output
def extension_message_handle(self, topic, payload):
- '''
- test: codelab-message-pub -j '{"topic":"scratch/extensions/command","payload":{"node_id":"eim/extension_usb_microbit", "content":"display.show(\"c\")"}}'
- '''
self.logger.info(f'python code: {payload["content"]}')
- message_id = payload.get("message_id")
+ # message_id = payload.get("message_id")
python_code = payload["content"]
- if "microbitHelper" in python_code:
- output = self.run_python_code(python_code)
- payload["content"] = output
- message = {"payload": payload} # 无论是否有message_id都返回
+ # send_command 直接运行 结果呢? 异步
+ # message_id = payload.get("message_id")
+ output = self.run_python_code(python_code)
+ # 运行命令和其他不一致(异步)
+ try:
+ output = json.dumps(output)
+ except Exception:
+ output = str(output)
+ if "thing.send_command(" in python_code:
+ # payload
+ # todo 异步发送
+ payload["content"] = "ok"
+ message = {"payload": payload}
self.publish(message)
+
else:
- self.q.put(python_code)
+ payload["content"] = output
+ message = {"payload": payload}
+ self.publish(message)
def run(self):
- while self._running:
- # 写入才能读出
- # 检查是否打开
- if self.microbitHelper.ser:
- try:
- self.microbitHelper.send_command()
- # 一读一写 比较稳定, todo: CQRS , todo makecode create hex
- response_from_microbit = self.microbitHelper.get_response_from_microbit(
- )
- if response_from_microbit:
- message = self.message_template()
- message["payload"]["content"] = response_from_microbit[
- "payload"]
- self.publish(message)
- rate = 10
- time.sleep(1 / rate)
- except Exception as e:
- self.logger.debug(str(e))
- time.sleep(0.5)
- else:
- time.sleep(0.5)
+ time.sleep(0.1)
+
+ def terminate(self, **kwargs):
+ try:
+ self.thing.disconnect()
+ except Exception:
+ pass
+ super().terminate(**kwargs)
-export = UsbMicrobitProxy
+export = MicrobitExtension
diff --git a/docs/extensions_nodes_mirrors/extension_webUI_manager.py b/docs/extensions_nodes_mirrors/extension_webUI_manager.py
new file mode 100644
index 0000000..bc70f7a
--- /dev/null
+++ b/docs/extensions_nodes_mirrors/extension_webUI_manager.py
@@ -0,0 +1,31 @@
+import time
+
+from codelab_adapter.core_extension import Extension
+from codelab_adapter_client.topic import GUI_TOPIC
+from codelab_adapter_client.utils import open_path, is_win
+
+
+class WebUI_Manager(Extension):
+ def __init__(self, *args, **kwargs):
+ super().__init__(*args, **kwargs)
+ self.NODE_ID = "adapter/WebUI_Manager"
+
+ def extension_message_handle(self, topic, payload):
+ content = payload["content"]
+ if content == "openHostsDir":
+ # unix/windows
+ # unix /etc/hosts
+ # windows C:\Windows\System32\drivers\etc
+ if is_win():
+ hosts_path = 'C:\Windows\System32\drivers\etc'
+ else:
+ hosts_path = '/etc'
+ self.logger.debug(payload)
+ open_path(hosts_path)
+
+ def run(self):
+ while self._running:
+ time.sleep(0.5)
+
+
+export = WebUI_Manager
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/extension_webserver.py b/docs/extensions_nodes_mirrors/extension_webserver.py
index da7daee..aeb3566 100644
--- a/docs/extensions_nodes_mirrors/extension_webserver.py
+++ b/docs/extensions_nodes_mirrors/extension_webserver.py
@@ -9,8 +9,8 @@
from bottle import route, run, template, view
from codelab_adapter.core_extension import Extension
-from codelab_adapter.utils import threaded, get_local_ip
-from codelab_adapter_client.utils import get_adapter_home_path
+from codelab_adapter.utils import threaded
+from codelab_adapter_client.utils import get_adapter_home_path, get_local_ip
# html 文件所在目录
bottle.TEMPLATE_PATH = [
diff --git a/docs/extensions_nodes_mirrors/extension_wechat.py b/docs/extensions_nodes_mirrors/extension_wechat.py
index d5832a1..d880d37 100644
--- a/docs/extensions_nodes_mirrors/extension_wechat.py
+++ b/docs/extensions_nodes_mirrors/extension_wechat.py
@@ -3,14 +3,26 @@
自动登陆默认不启用,可通过配置项启用
kill itchat thread
'''
-import itchat, time
-from itchat.content import TEXT
+
import zmq
import pathlib
import threading
-from codelab_adapter.utils import threaded
+from codelab_adapter.utils import threaded, is_win
from codelab_adapter.core_extension import Extension
+if is_win():
+ import io
+ from contextlib import redirect_stdout, redirect_stderr
+ stdout = io.StringIO()
+ stderr = io.StringIO()
+ with redirect_stdout(stdout), redirect_stderr(stderr):
+ import itchat, time
+ from itchat.content import TEXT
+else:
+ import itchat, time
+ from itchat.content import TEXT
+
+
codelab_adapter_dir = pathlib.Path.home() / "codelab_adapter"
class WechatGateway(Extension):
diff --git a/docs/extensions_nodes_mirrors/extensions_nodes.json b/docs/extensions_nodes_mirrors/extensions_nodes.json
index 8f11470..497a103 100644
--- a/docs/extensions_nodes_mirrors/extensions_nodes.json
+++ b/docs/extensions_nodes_mirrors/extensions_nodes.json
@@ -1 +1 @@
-{"nodes": [{"value": "node_physical_blocks.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_physical_blocks.py"}, {"value": "node_vector.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_vector.py"}, {"value": "node_minecraft.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_minecraft.py"}, {"value": "node_jupyterlab.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_jupyterlab.py"}, {"value": "node_cozmo.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_cozmo.py"}, {"value": "node_eim_monitor.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_eim_monitor.py"}, {"value": "node_blender.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_blender.py"}, {"value": "node_motionSensor_gesture.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_motionSensor_gesture.py"}, {"value": "node_HCI.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_HCI.py"}, {"value": "node_motionSensor_proximity.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_motionSensor_proximity.py"}, {"value": "node_eim.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_eim.py"}, {"value": "node_raspberrypi.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_raspberrypi.py"}, {"value": "node_sonicPi.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_sonicPi.py"}, {"value": "node_Yanshee.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_Yanshee.py"}], "extensions": [{"value": "extension_simple_NLU.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_simple_NLU.py"}, {"value": "extension_microbit_radio.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_microbit_radio.py"}, {"value": "extension_eim.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_eim.py"}, {"value": "extension_Siri.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_Siri.py"}, {"value": "extension_http_eim.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_http_eim.py"}, {"value": "extension_webserver.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_webserver.py"}, {"value": "extension_calypso.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_calypso.py"}, {"value": "extension_jupyterlab.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_jupyterlab.py"}, {"value": "extension_eim_monitor.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_eim_monitor.py"}, {"value": "extension_mqtt_adapter.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_mqtt_adapter.py"}, {"value": "extension_pomodoros.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_pomodoros.py"}, {"value": "extension_tello.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_tello.py"}, {"value": "extension_mqtt_broker.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_mqtt_broker.py"}, {"value": "extension_kano_wand.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_kano_wand.py"}, {"value": "extension_NetworkZero.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_NetworkZero.py"}, {"value": "extension_Aqara_scene.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_Aqara_scene.py"}, {"value": "extension_RoboMaster.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_RoboMaster.py"}, {"value": "extension_eim_trigger.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_eim_trigger.py"}, {"value": "extension_python.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_python.py"}, {"value": "extension_arduino_uno.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_arduino_uno.py"}, {"value": "extension_stage.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_stage.py"}, {"value": "extension_uart_adapter.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_uart_adapter.py"}, {"value": "extension_python_exec.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_python_exec.py"}, {"value": "extension_wechat.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_wechat.py"}, {"value": "extension_usb_microbit.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_usb_microbit.py"}]}
\ No newline at end of file
+{"nodes": [{"value": "node_physical_blocks.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_physical_blocks.py"}, {"value": "node_vector.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_vector.py"}, {"value": "node_minecraft.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_minecraft.py"}, {"value": "node_yeelight.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_yeelight.py"}, {"value": "node_RoboMasterEP2.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_RoboMasterEP2.py"}, {"value": "node_jupyterlab.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_jupyterlab.py"}, {"value": "node_tello4.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_tello4.py"}, {"value": "node_cozmo.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_cozmo.py"}, {"value": "node_eim_monitor.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_eim_monitor.py"}, {"value": "node_blender.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_blender.py"}, {"value": "node_motionSensor_gesture.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_motionSensor_gesture.py"}, {"value": "node_HCI.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_HCI.py"}, {"value": "node_physical_blocks2.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_physical_blocks2.py"}, {"value": "node_thingDemo.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_thingDemo.py"}, {"value": "node_adapterMario.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_adapterMario.py"}, {"value": "node_motionSensor_proximity.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_motionSensor_proximity.py"}, {"value": "node_tello2.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_tello2.py"}, {"value": "node_webserver_flask.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_webserver_flask.py"}, {"value": "node_RoboMaster2.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_RoboMaster2.py"}, {"value": "node_overdrive2.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_overdrive2.py"}, {"value": "node_RoboMaster3.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_RoboMaster3.py"}, {"value": "node_overdrive.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_overdrive.py"}, {"value": "node_eim.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_eim.py"}, {"value": "node_tello3.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_tello3.py"}, {"value": "node_raspberrypi.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_raspberrypi.py"}, {"value": "node_sonicPi.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_sonicPi.py"}, {"value": "node_Yanshee.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_Yanshee.py"}, {"value": "node_alphamini.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_alphamini.py"}, {"value": "node_digimon.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/node_digimon.py"}], "extensions": [{"value": "extension_simple_NLU.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_simple_NLU.py"}, {"value": "extension_microbit_radio.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_microbit_radio.py"}, {"value": "extension_eim.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_eim.py"}, {"value": "extension_Siri.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_Siri.py"}, {"value": "extension_http_eim.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_http_eim.py"}, {"value": "extension_webserver.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_webserver.py"}, {"value": "extension_calypso.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_calypso.py"}, {"value": "extension_jupyterlab.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_jupyterlab.py"}, {"value": "extension_eim_monitor.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_eim_monitor.py"}, {"value": "extension_mqtt_adapter.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_mqtt_adapter.py"}, {"value": "extension_pomodoros.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_pomodoros.py"}, {"value": "extension_webUI_manager.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_webUI_manager.py"}, {"value": "extension_tello.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_tello.py"}, {"value": "extension_mqtt_broker.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_mqtt_broker.py"}, {"value": "extension_kano_wand.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_kano_wand.py"}, {"value": "extension_NetworkZero.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_NetworkZero.py"}, {"value": "extension_socket_server.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_socket_server.py"}, {"value": "extension_Aqara_scene.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_Aqara_scene.py"}, {"value": "extension_RoboMaster.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_RoboMaster.py"}, {"value": "extension_eim_trigger.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_eim_trigger.py"}, {"value": "extension_python.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_python.py"}, {"value": "extension_arduino_uno.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_arduino_uno.py"}, {"value": "extension_stage.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_stage.py"}, {"value": "extension_uart_adapter.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_uart_adapter.py"}, {"value": "extension_wechat.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_wechat.py"}, {"value": "extension_usb_microbit.py", "url": "https://adapter.codelab.club/extensions_nodes_mirrors/extension_usb_microbit.py"}]}
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/node_HCI.py b/docs/extensions_nodes_mirrors/node_HCI.py
index 686fdf4..0938b1d 100644
--- a/docs/extensions_nodes_mirrors/node_HCI.py
+++ b/docs/extensions_nodes_mirrors/node_HCI.py
@@ -1,44 +1,33 @@
'''
HCI: human–machine interaction
本插件支持将任何输入映射为鼠标键盘行为
-
-PyAutoGUI only runs on Windows, Mac, and Linux.
-If you lose control and need to stop the current PyAutoGUI function, keep moving the mouse cursor up and to the left.
-
-tips:
- currentMouseX, currentMouseY = pyautogui.position()
- pyautogui.moveTo(100, 150)
- pyautogui.click()
- pyautogui.moveRel(None, 10) # move mouse 10 pixels down
- pyautogui.typewrite('Hello world!', interval=0.25)
-
'''
import queue
import time
-import pyautogui # todo 自动安装
from codelab_adapter_client import AdapterNode
+from codelab_adapter_client.utils import install_requirement
+
+try:
+ import pyautogui
+except ModuleNotFoundError:
+ REQUIREMENTS = ["pyautogui"]
+ install_requirement(REQUIREMENTS)
+ import pyautogui
class HCINode(AdapterNode):
- '''
- Everything Is Message
- ref: https://github.com/CodeLabClub/codelab_adapter_extensions/blob/master/extensions_v2/extension_python_kernel.py
- '''
NODE_ID = "eim/node_HCI"
WEIGHT = 98
HELP_URL = "https://adapter.codelab.club/extension_guide/HCI/"
DESCRIPTION = "接管鼠标键盘"
VERSION = "1.1.0"
- def __init__(self):
- super().__init__()
+ def __init__(self, **kwargs):
+ super().__init__(**kwargs)
self.q = queue.Queue()
def extension_message_handle(self, topic, payload):
- # self.q.put(payload)
- # payload = self.q.get()
- message_id = payload.get("message_id")
python_code = payload["content"]
try:
output = eval(python_code, {"__builtins__": None}, {
@@ -50,17 +39,14 @@ def extension_message_handle(self, topic, payload):
message = {"payload": payload}
self.publish(message)
- def exit_message_handle(self, topic, payload):
- self.terminate()
-
def run(self):
while self._running:
time.sleep(0.5)
-if __name__ == "__main__":
+def main(**kwargs):
try:
- node = HCINode()
+ node = HCINode(**kwargs)
node.receive_loop_as_thread()
node.run()
except KeyboardInterrupt:
@@ -69,4 +55,8 @@ def run(self):
node.logger.error(str(e))
node.pub_notification(str(e), type="ERROR")
time.sleep(0.05)
- node.terminate() # Clean up before exiting.
\ No newline at end of file
+ node.terminate() # Clean up before exiting.
+
+
+if __name__ == "__main__":
+ main()
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/node_RoboMaster2.py b/docs/extensions_nodes_mirrors/node_RoboMaster2.py
new file mode 100644
index 0000000..1be7dd4
--- /dev/null
+++ b/docs/extensions_nodes_mirrors/node_RoboMaster2.py
@@ -0,0 +1,136 @@
+'''
+pip install robomasterpy==0.1.1
+ node 在外层依赖即可,window mac会提示依赖
+# https://robomasterpy.nanmu.me/en/latest/
+# https://github.com/nanmu42/robo-playground
+'''
+
+import socket
+import time
+import json
+from loguru import logger
+
+from codelab_adapter_client import AdapterNode # todo 异步插件启动确认
+from codelab_adapter_client.thing import AdapterThing
+
+import robomasterpy as rm # rm.get_broadcast_ip(timeout=1)
+
+
+class EPProxy(AdapterThing):
+ '''
+ AdapterThing
+ init
+ self.thing_name
+ self.node_instance
+ self.is_connected = False
+ self.thing = None
+ python eval code
+ connect
+ robot.chassis_move(x=-1, z=30) # thing不存在
+ # 分派方法和参数
+ '''
+ def __init__(self, node_instance):
+ # todo pydanic
+ super().__init__(thing_name="Robomaster EP",
+ node_instance=node_instance)
+
+ def list(self, timeout=5):
+ try:
+ broadcast_ip = rm.get_broadcast_ip(timeout=timeout) # 多个怎么办?
+ return [str(broadcast_ip)]
+ except socket.timeout:
+ self.node_instance.pub_notification(
+ f"timeout({timeout}s) when get_broadcast_ip", type="ERROR")
+ return []
+ except Exception as e:
+ self.node_instance.pub_notification(
+ str(e), type="ERROR")
+ return []
+ # 销毁socket
+
+ def connect(self, ip, timeout=5):
+ # 修改 self.thing
+ self.thing = rm.Commander(ip, timeout)
+
+ def status(self, **kwargs) -> bool:
+ # check status
+ # query thing status, 与设备通信,检查 is_connected 状态,修改它
+ pass
+
+ def disconnect(self):
+ self.thing.close(
+ ) # 关闭实例,回收socket资源。注意这个命令并不会发送quit到机甲,避免打扰其他在线的Commander.
+ # 允许多个client控制一个机甲
+ self.is_connected = False
+ self.thing = None
+
+ # 转发
+ # cmd.chassis_move(x=-1, z=30)
+ # self.thing.chassis_move(x=-1, z=30)
+ # robot.thing.chassis_move(x=-1, z=30)
+
+
+class EPExtension(AdapterNode):
+ NODE_ID = "eim/node_RoboMaster2"
+ HELP_URL = "http://adapter.codelab.club/extension_guide/RoboMaster2/"
+ DESCRIPTION = "开火!RoboMaster"
+ VERSION = "2.0.0"
+
+ def __init__(self):
+ super().__init__(logger=logger)
+ self.ep = EPProxy(self) # create proxy object
+
+ def run_python_code(self, code):
+ try:
+ output = eval(
+ code,
+ {"__builtins__": None},
+ {
+ "robot": self.ep.thing, # 直接调用方法
+ "connect": self.ep.connect,
+ "disconnect": self.ep.disconnect,
+ "list": self.ep.list,
+ })
+ except Exception as e:
+ # logger.exception('what?')
+ output = e
+ return output
+
+ def extension_message_handle(self, topic, payload):
+ # todo 判断是否连接成功,否则报告连接问题
+
+ logger.info(f'code: {payload["content"]}')
+ python_code = payload["content"]
+ output = self.run_python_code(python_code)
+ try:
+ output = json.dumps(output)
+ except Exception:
+ output = str(output)
+ payload["content"] = output
+ message = {"payload": payload}
+ self.publish(message)
+
+ def run(self):
+ while self._running:
+ time.sleep(0.5)
+
+ # release robot proxy object
+ def terminate(self, **kwargs):
+ try:
+ if self.ep.is_connected:
+ self.ep.disconnect()
+ except Exception:
+ pass
+ super().terminate(**kwargs)
+
+
+if __name__ == "__main__":
+ try:
+ node = EPExtension()
+ node.receive_loop_as_thread()
+ node.run()
+ except Exception as e:
+ if node._running:
+ node.pub_notification(str(e), type="ERROR")
+ time.sleep(0.1)
+ node.terminate()
diff --git a/docs/extensions_nodes_mirrors/node_RoboMaster3.py b/docs/extensions_nodes_mirrors/node_RoboMaster3.py
new file mode 100644
index 0000000..3af5207
--- /dev/null
+++ b/docs/extensions_nodes_mirrors/node_RoboMaster3.py
@@ -0,0 +1,91 @@
+'''
+pip install robomaster codelab_adapter_client --upgrade
+doc: https://robomaster-dev.readthedocs.io/zh_CN/latest/python_sdk/beginner_ep.html
+仅支持
+ macOS >= 10.15
+ Window amd64
+
+策略作为外部 Node,能够和Adapter通信
+
+使用 EIM 测试: eim/extension_RoboMasterEP3
+'''
+
+import time
+from loguru import logger
+from codelab_adapter_client import AdapterNode
+from codelab_adapter_client.utils import get_or_create_node_logger_dir
+from robomaster import robot
+from robomaster import blaster
+
+node_logger_dir = get_or_create_node_logger_dir()
+debug_log = str(node_logger_dir / "debug.log")
+logger.add(debug_log, rotation="1 MB", level="DEBUG")
+
+
+class EP3Node(AdapterNode):
+ NODE_ID = "eim/extension_RoboMasterEP3"
+ HELP_URL = "https://adapter.codelab.club/extension_guide/RoboMaster_EP2/"
+ DESCRIPTION = "RoboMaster EP 3.0"
+
+ def __init__(self):
+ super().__init__(logger=logger)
+ self.ep_robot = None
+
+ def init_device(self, timeout=5, conn_type="sta"):
+ '''
+ conn_type
+ sta 机器人接入局域网
+ ap 机器人作为热点
+ '''
+ # todo timeout
+ self.ep_robot = robot.Robot()
+ self.ep_robot.initialize(conn_type=conn_type)
+ self.pub_notification("RoboMaster 已连接", type="SUCCESS")
+
+ def run_python_code(self, code):
+ try:
+ # 允许用户传入连接参数 init_device
+ output = eval(code, {"__builtins__": None}, {"ep_robot": self.ep_robot, "blaster": blaster, "init_device": self.init_device})
+ except Exception as e:
+ output = e
+ return output
+
+ def extension_message_handle(self, topic, payload):
+ self.logger.info(f'code: {payload["content"]}')
+ message_id = payload.get("message_id")
+ python_code = payload["content"]
+ if self.ep_robot:
+ output = self.run_python_code(python_code)
+ payload["content"] = str(output)
+ message = {"payload": payload}
+ self.publish(message)
+
+ def run(self):
+ "避免插件结束退出"
+ try:
+ self.init_device()
+ except Exception as e:
+ self.logger.error(e)
+ self.pub_notification(str(e), type="ERROR")
+ return
+ while self._running:
+ time.sleep(0.5)
+
+ def terminate(self, **kwargs):
+ try:
+ if self.ep_robot:
+ self.ep_robot.close()
+ self.ep_robot = None
+ except Exception as e:
+ self.pub_notification(str(e), type="ERROR")
+ time.sleep(0.1)
+ super().terminate(**kwargs)
+
+if __name__ == "__main__":
+ try:
+ node = EP3Node()
+ node.receive_loop_as_thread()
+ node.run()
+ except:
+ if node._running:
+ node.terminate()
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/node_RoboMasterEP2.py b/docs/extensions_nodes_mirrors/node_RoboMasterEP2.py
new file mode 100644
index 0000000..6257ecf
--- /dev/null
+++ b/docs/extensions_nodes_mirrors/node_RoboMasterEP2.py
@@ -0,0 +1,143 @@
+'''
+pip install robomasterpy==0.1.1
+ node 在外层依赖即可,window mac会提示依赖
+# https://robomasterpy.nanmu.me/en/latest/
+# https://github.com/nanmu42/robo-playground
+'''
+
+import socket
+import time
+import json
+from loguru import logger
+
+from codelab_adapter_client import AdapterNode # todo 异步插件启动确认
+from codelab_adapter_client.thing import AdapterThing
+
+import robomasterpy as rm # rm.get_broadcast_ip(timeout=1)
+
+
+class EPProxy(AdapterThing):
+ '''
+ AdapterThing
+ init
+ self.thing_name
+ self.node_instance
+ self.is_connected = False
+ self.thing = None
+ python eval code
+ connect
+ robot.chassis_move(x=-1, z=30) # thing不存在
+ # 分派方法和参数
+ '''
+ def __init__(self, node_instance):
+ # todo pydanic
+ super().__init__(thing_name="Robomaster EP",
+ node_instance=node_instance)
+
+ def list(self, timeout=5):
+ try:
+ broadcast_ip = rm.get_broadcast_ip(timeout=timeout) # 多个怎么办?
+ return [str(broadcast_ip)]
+ except socket.timeout:
+ # self.node_instance.pub_notification(f"获取设备IP超时({timeout}s)", type="ERROR")
+ self.node_instance.pub_notification("未发现 RoboMasterEP", type="ERROR")
+ return []
+ except Exception as e:
+ self.node_instance.pub_notification(
+ str(e), type="ERROR")
+ return []
+
+ def connect(self, ip, timeout=5):
+ # 修改 self.thing, connect失败呢?
+ try:
+ self.thing = rm.Commander(ip, timeout)
+ self.node_instance.pub_notification("RoboMasterEP 已连接", type="SUCCESS")
+ except Exception as e:
+ self.node_instance.pub_notification(str(e), type="ERROR")
+
+ def status(self, **kwargs) -> bool:
+ # check status
+ # query thing status, 与设备通信,检查 is_connected 状态,修改它
+ pass
+
+ def disconnect(self):
+ if self.thing:
+ self.thing.close() # 关闭实例,回收socket资源。注意这个命令并不会发送quit到机甲,避免打扰其他在线的Commander.
+ # 允许多个client控制一个机甲
+ self.is_connected = False
+ self.thing = None
+
+ # 转发
+ # cmd.chassis_move(x=-1, z=30)
+ # self.thing.chassis_move(x=-1, z=30)
+ # robot.thing.chassis_move(x=-1, z=30)
+
+
+class EPExtension(AdapterNode):
+ NODE_ID = "eim/node_RoboMasterEP2"
+ HELP_URL = "http://adapter.codelab.club/extension_guide/RoboMasterEP2/"
+ DESCRIPTION = "开火!RoboMaster EP"
+ VERSION = "2.0.1" # 处理connect问题
+
+ def __init__(self, **kwargs):
+ super().__init__(logger=logger, **kwargs)
+ self.ep = EPProxy(self) # create proxy object
+
+ def run_python_code(self, code):
+ try:
+ output = eval(
+ code,
+ {"__builtins__": None},
+ {
+ "robot": self.ep.thing, # 直接调用方法
+ "connect": self.ep.connect,
+ "disconnect": self.ep.disconnect,
+ "list": self.ep.list,
+ })
+ except Exception as e:
+ # logger.exception('what?')
+ output = e
+ return output
+
+ def extension_message_handle(self, topic, payload):
+ # todo 判断是否连接成功,否则报告连接问题
+
+ logger.info(f'code: {payload["content"]}')
+ python_code = payload["content"]
+ output = self.run_python_code(python_code)
+ try:
+ output = json.dumps(output)
+ except Exception:
+ output = str(output)
+ payload["content"] = output
+ message = {"payload": payload}
+ self.publish(message)
+
+ def run(self):
+ while self._running:
+ time.sleep(0.5)
+
+ # release robot proxy object
+ def terminate(self, **kwargs):
+ try:
+ if self.ep.is_connected:
+ self.ep.disconnect()
+ except Exception:
+ pass
+ super().terminate(**kwargs)
+
+
+def main(**kwargs):
+ try:
+ node = EPExtension(**kwargs)
+ node.receive_loop_as_thread()
+ node.run()
+ except Exception as e:
+ if node._running:
+ node.pub_notification(str(e), type="ERROR")
+ time.sleep(0.1)
+ node.terminate()
+
+
+if __name__ == "__main__":
+ main()
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/node_adapterMario.py b/docs/extensions_nodes_mirrors/node_adapterMario.py
new file mode 100644
index 0000000..ad8c80f
--- /dev/null
+++ b/docs/extensions_nodes_mirrors/node_adapterMario.py
@@ -0,0 +1,283 @@
+import asyncio
+import json
+import time
+try:
+ from bleak import BleakScanner, BleakClient, BleakError # 有些windows无法使用
+except Exception:
+ pass
+from codelab_adapter_client import AdapterNodeAio
+from codelab_adapter_client.thing import AdapterThing
+from codelab_adapter_client.utils import is_win
+
+from codelab_adapter_client.config import settings
+from loguru import logger
+debug_log = str(settings.NODE_LOG_PATH / "adapterMario.log")
+logger.add(debug_log, rotation="1 MB", level="DEBUG")
+
+
+# Class for the controller
+class MarioController(AdapterThing):
+ LEGO_CHARACTERISTIC_UUID = "00001624-1212-efde-1623-785feabcd123"
+ SUBSCRIBE_IMU_COMMAND = bytearray(
+ [0x0A, 0x00, 0x41, 0x00, 0x00, 0x05, 0x00, 0x00, 0x00, 0x01])
+ SUBSCRIBE_RGB_COMMAND = bytearray(
+ [0x0A, 0x00, 0x41, 0x01, 0x00, 0x05, 0x00, 0x00, 0x00, 0x01])
+
+ def __init__(self, node_instance):
+ super().__init__(thing_name="Mario", node_instance=node_instance)
+ self.current_x = 0
+ self.current_y = 0
+ self.current_z = 0
+ self.is_connected = False
+ self.task = None
+
+ self.devices_list = {}
+ self.device_flag = "lego"
+ self.scanner = None
+ # self.q = queue.Queue()
+
+ def _detection_ble_callback(self, device, advertisement_data):
+ # devices_list 实时更新
+ if self.device_flag in str(device).lower():
+ self.devices_list[str(device.address)] = {
+ "name": str(device.address),
+ "peripheralId": str(device.address),
+ "rssi": device.rssi,
+ }
+ message = self.node_instance.message_template()
+ message["payload"]["message_type"] = "devices_list"
+ message["payload"]["content"] = list(self.devices_list.values())
+
+ asyncio.create_task(self.node_instance.publish(message))
+
+ async def list(self, timeout=5) -> list:
+ # logger.debug("list devices...")
+ self.devices_list = {} # 清空
+ try:
+ scanner = BleakScanner()
+ self.scanner = scanner
+ scanner.register_detection_callback(self._detection_ble_callback)
+ await scanner.start()
+ await asyncio.sleep(5.0)
+ await self.scanner.stop()
+ except BleakError as e:
+ # 提醒开启蓝牙
+ logger.error(e)
+ await self.node_instance.pub_notification(str(e), type="ERROR")
+ return []
+
+ async def _send_connect_reply(self):
+ # from RVR
+ payload = self.node_instance.connect_payload
+ message = {"payload": payload}
+ await self.node_instance.publish(message)
+
+ async def _send_disconnect_message(self):
+ await self.node_instance.pub_notification(
+ f'{self.node_instance.NODE_ID} 已断开', type="WARNING")
+
+ async def _connect(self, address):
+ async with BleakClient(address) as client:
+ await client.is_connected()
+ # 连接成功反馈
+ await self._send_connect_reply()
+ self.is_connected = True
+ await client.start_notify(self.LEGO_CHARACTERISTIC_UUID,
+ self.notification_handler)
+ await asyncio.sleep(0.1)
+ await client.write_gatt_char(self.LEGO_CHARACTERISTIC_UUID,
+ self.SUBSCRIBE_IMU_COMMAND)
+ await asyncio.sleep(0.1)
+ await client.write_gatt_char(self.LEGO_CHARACTERISTIC_UUID,
+ self.SUBSCRIBE_RGB_COMMAND)
+ while await client.is_connected():
+ await asyncio.sleep(0.1)
+ # 发送断开消息
+ # disconnect
+ await self._send_disconnect_message()
+
+ async def connect(self, address, timeout=5):
+ if not self.thing:
+ # self.thing = BleakClient(address)
+ # as task
+ # 等待future, 外部停掉
+ self.task = asyncio.create_task(
+ self._connect(address)) # todo 真正连上后发出
+ # await asyncio.sleep(3)
+ return True
+
+ async def status(self):
+ pass
+
+ async def disconnect(self):
+ if self.task:
+ self.task.cancel() # 让用户知道错误信息
+ self.is_connected = False
+ if self.thing:
+ await self.thing.disconnect()
+ self.thing = None
+ return True
+
+ ### 以下是具体设备驱动
+
+ def signed(self, char):
+ return char - 256 if char > 127 else char
+
+ async def _send_to_adapter(self, content, message_type="setProperty"):
+ message = self.node_instance.message_template()
+ message["payload"]["message_type"] = message_type
+ message["payload"]["content"] = content
+ # property_notify属性的变化
+ await self.node_instance.publish(message)
+
+ def property_notify(self, data):
+ '''
+ msg = {
+ "topic": "things/urn:lego:mario/state",
+ "messageType": "setProperty",
+ "data": data
+ }
+ '''
+ logger.debug(f'data: {data}')
+ asyncio.create_task(self._send_to_adapter(data))
+ # self.q.put(data) # sync -> async
+ # send to eim
+ # validate_msg = InputMsg(**msg)
+ # ee.emit("things/urn:lego:mario", validate_msg)
+
+ def notification_handler(self, sender, data):
+ # Camera sensor data
+ # todo eim
+ if data[0] == 8:
+ # RGB code
+ if data[5] == 0x0:
+ # print(data[4])
+ if data[4] == 0xb8:
+ logger.debug("Start tile")
+ self.property_notify({"barcode": "Start"})
+ if data[4] == 0xb7:
+ logger.debug("Goal tile")
+ self.property_notify({"barcode": "Goal"})
+ logger.debug("Barcode: " + " ".join(hex(n) for n in data))
+
+ # Red tile
+ elif data[6] == 0x15:
+ # print("Red tile")
+ self.property_notify({"color": "Red"})
+ # Green tile
+ elif data[6] == 0x25:
+ # print("Green tile")
+ self.property_notify({"color": "Green"})
+ elif data[6] == 0x17:
+ # print("Blue tile")
+ self.property_notify({"color": "Blue"})
+ elif data[6] == 0x17:
+ # print("Blue tile")
+ self.property_notify({"color": "Blue"})
+ elif data[6] == 0x13:
+ # print("White tile")
+ self.property_notify({"color": "White"})
+ elif data[6] == 0x18:
+ # # print("Yellow tile")
+ self.property_notify({"color": "Yellow"})
+ elif data[6] == 0x6A:
+ ## print("Brown tile")
+ self.property_notify({"color": "Brown"})
+ # No tile
+ elif data[6] == 0x1a:
+ # # print("No tile")
+ self.property_notify({"color": "NoColor"})
+
+ # Accelerometer data
+ elif data[0] == 7:
+ self.current_x = int((self.current_x * 0.5) +
+ (self.signed(data[4]) * 0.5))
+ self.current_y = int((self.current_y * 0.5) +
+ (self.signed(data[5]) * 0.5))
+ self.current_z = int((self.current_z * 0.5) +
+ (self.signed(data[6]) * 0.5))
+ self.property_notify({
+ "coordinate": {
+ "x": self.current_x,
+ "y": self.current_y,
+ "z": self.current_z
+ }
+ })
+ '''
+ # 在 scratch 中处理,利用hat积木的特性: 如无变化,只发生一次
+ if self.current_z > 15:
+ self.property_notify({"action": "backward"})
+ elif self.current_z < -15:
+ self.property_notify({"action": "forward"})
+ if self.current_x > 20:
+ self.property_notify({"action": "jump"}) # todo? 时间?
+ '''
+ # # print("X: %i | Y: %i | Z: %i" % (self.current_x, self.current_y, self.current_z))
+
+
+class MyNode(AdapterNodeAio):
+ NODE_ID = "eim/node_adapterMario"
+ HELP_URL = "https://adapter.codelab.club/extension_guide/adapterMario/"
+ DESCRIPTION = "登登登等登蹬"
+ VERSION = "2.1.0" # 设备掉线通知
+
+ def __init__(self, **kwargs):
+ super().__init__(logger=logger, bucket_token=300, bucket_fill_rate=300, **kwargs)
+ self.thing = MarioController(self)
+ self.connect_payload = None
+
+ async def run_python_code(self, code):
+ try:
+ output = await eval(
+ code,
+ {"__builtins__": None},
+ {
+ # "thing": self.thing.thing, # 推送风格
+ "connect": self.thing.connect,
+ "disconnect": self.thing.disconnect,
+ "list": self.thing.list,
+ })
+ except Exception as e:
+ output = e
+ return output
+
+ async def extension_message_handle(self, topic, payload):
+ self.logger.info(f'code: {payload["content"]}')
+ python_code = payload["content"]
+ if python_code.startswith('connect('):
+ # connect
+ self.connect_payload = payload
+ output = await self.run_python_code(python_code)
+ try:
+ output = json.dumps(output)
+ except Exception:
+ output = str(output)
+ if not python_code.startswith('connect('):
+ # connect 连上之后(异步)发送
+ payload["content"] = output
+ message = {"payload": payload}
+ await self.publish(message)
+
+ def run(self):
+ while self._running:
+ time.sleep(0.5)
+
+ async def terminate(self, **kwargs):
+ try:
+ await self.thing.disconnect()
+ except Exception:
+ pass
+ await super().terminate(**kwargs)
+
+
+def main(**kwargs):
+ try:
+ node = MyNode(**kwargs)
+ asyncio.run(node.receive_loop()) # CPU?
+ except Exception:
+ if node._running:
+ asyncio.run(node.terminate())
+
+
+if __name__ == "__main__":
+ main()
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/node_alphamini.py b/docs/extensions_nodes_mirrors/node_alphamini.py
new file mode 100644
index 0000000..2c4245d
--- /dev/null
+++ b/docs/extensions_nodes_mirrors/node_alphamini.py
@@ -0,0 +1,340 @@
+'''
+pip install alphamini==1.1.0
+https://web.ubtrobot.com/mini-python-sdk/guide.html
+https://github.com/marklogg/mini_demo.git
+
+内置行为: https://web.ubtrobot.com/mini-python-sdk/additional.html
+'''
+
+import asyncio
+from loguru import logger
+
+from codelab_adapter_client import AdapterNodeAio # todo 异步插件启动确认
+from codelab_adapter_client.thing import AdapterThing
+
+import mini.mini_sdk as MiniSdk
+from mini.apis.base_api import MiniApiResultType
+from mini.dns.dns_browser import WiFiDevice
+from mini.apis.api_sound import StartPlayTTS, StopPlayTTS, ControlTTSResponse
+from mini.apis.api_action import PlayAction, PlayActionResponse
+from mini.apis.api_action import GetActionList, GetActionListResponse, RobotActionType
+from mini.apis.api_setup import StartRunProgram
+from mini.apis.api_action import MoveRobot, MoveRobotDirection, MoveRobotResponse
+from mini.apis.api_expression import PlayExpression, PlayExpressionResponse
+from mini.apis.api_behavior import StartBehavior, StopBehavior
+
+from mini.apis.api_sence import FaceAnalysis, FaceAnalyzeResponse
+from mini.apis.api_sence import FaceDetect, FaceDetectResponse
+from mini.apis.api_sence import FaceRecognise, FaceRecogniseResponse
+# 使用异步节点
+
+# 红外测距
+from mini.apis.api_sence import GetInfraredDistance, GetInfraredDistanceResponse
+# 物体识别 水果 鲜花 手势
+from mini.apis.api_sence import ObjectRecognise, RecogniseObjectResponse, ObjectRecogniseType
+
+
+class RobotProxy(AdapterThing):
+ '''
+ AdapterThing
+ init
+ self.thing_name
+ self.node_instance
+ self.is_connected = False
+ self.thing = None
+ '''
+ def __init__(self, node_instance):
+ # todo pydanic
+ super().__init__(thing_name="悟空机器人(alphamini)", node_instance=node_instance)
+
+ async def list(self):
+ # 需要在UI中填入序列号连接
+ # 课堂 在UI输入序列号连接
+ # self._ensure_connect()
+ return
+
+ '''
+ results = await MiniSdk.get_device_list(10) # 无法搜到
+ # print(results)
+ return [str(i) for i in results]
+ '''
+
+ async def connect(self, robot_name):
+ # 修改 self.thing
+ if self.is_connected:
+ return f"{self.thing_name} already connected"
+ else:
+ # robot_name = kwargs.get("robot_name") # todo
+ self.thing: WiFiDevice = await MiniSdk.get_device_by_name(
+ robot_name, 10)
+ if self.thing:
+ is_success = await MiniSdk.connect(self.thing)
+ if is_success:
+ self.is_connected = True
+ # (resultType, response) = await StartRunProgram().execute() #
+ await MiniSdk.enter_program()
+ # await self.say()
+ # await asyncio.sleep(100)
+ return is_success
+
+ def status(self, **kwargs) -> bool:
+ # check status
+ # query thing status, 与设备通信,检查 is_connected 状态,修改它
+ pass
+
+ # disconnect, 兼容
+ async def quit(self):
+ self._ensure_connect()
+ await MiniSdk.quit_program()
+ await MiniSdk.release()
+ self.is_connected = False
+ self.thing = None
+
+ async def disconnect(self):
+ return await self.quit()
+
+ ################## 以下是业务逻辑
+
+ async def GetActionList(self):
+ self._ensure_connect()
+ # robot.play(name="bow",speed="slow",operation="start")
+ block: GetActionList = GetActionList(action_type=RobotActionType.INNER)
+ # response:GetActionListResponse
+ (resultType, response) = await block.execute()
+ return response
+
+ async def play_action(self, **kwargs):
+ '''
+ https://web.ubtrobot.com/mini-python-sdk/additional.html#id2
+ https://web.ubtrobot.com/mini-python-sdk/additional.html#id3
+
+ 010 打招呼
+ 011 点头
+ 012 俯卧撑
+ 013 武术
+ 014 太极
+ 027 坐下
+ 031 蹲下
+ 017 举双手
+ 015 欢迎
+ 037 摇头
+ Surveillance_001 打招呼
+ Surveillance_004 飞吻
+ Surveillance_006 卖萌
+ action_016 再见
+ action_014 邀请
+ action_005 点赞
+ '''
+ self._ensure_connect()
+ block: PlayAction = PlayAction(**kwargs)
+ # response: PlayActionResponse
+ (resultType, response) = await block.execute()
+ return response
+
+ async def play_expression(self, **kwargs):
+ '''
+ codemao9 打喷嚏
+ codemao13 疑问
+ codemao16 贱贱的笑
+ codemao20 眨眼
+ emo_020 发呆
+ codemao19 爱心
+ '''
+ self._ensure_connect()
+ # https://web.ubtrobot.com/mini-python-sdk/additional.html#id4
+ block: PlayExpression = PlayExpression(**kwargs)
+ # response: PlayExpressionResponse
+ (resultType, response) = await block.execute()
+ return response
+
+ async def play_behavior(self, **kwargs):
+ '''
+ custom_0035 生日快乐
+ dance_0008 虫儿飞
+ '''
+ self._ensure_connect()
+ # https://web.ubtrobot.com/mini-python-sdk/additional.html#id4
+ block = StartBehavior(**kwargs)
+ if kwargs.get("is_serial"):
+ (resultType, response) = await block.execute()
+ return response
+ else:
+ return await block.execute()
+
+ async def stop_behavior(self, **kwargs):
+ '''
+ custom_0035 生日快乐
+ dance_0008 虫儿飞
+ '''
+ self._ensure_connect()
+ # https://web.ubtrobot.com/mini-python-sdk/additional.html#id4
+ block = StopBehavior(**kwargs)
+ (resultType, response) = await block.execute()
+ return response
+
+ async def move(self, step=1, direction="FORWARD"):
+ '''
+ FORWARD : 向前
+ BACKWARD : 向后
+ LEFTWARD : 向左
+ RIGHTWARD : 向右
+ '''
+ self._ensure_connect()
+ block: MoveRobot = MoveRobot(step=step,
+ direction=MoveRobotDirection[direction])
+ (resultType, response) = await block.execute()
+ return response
+
+ async def bow(self):
+ self._ensure_connect()
+ # robot.play(name="bow",speed="slow",operation="start")
+ pass
+
+ async def say(self, **kwargs):
+ self._ensure_connect()
+ block: StartPlayTTS = StartPlayTTS(**kwargs)
+ # 返回元组, response是个ControlTTSResponse
+ (resultType, response) = await block.execute()
+
+ ### 人脸api: https://github.com/marklogg/mini_demo/blob/42cacfa5c8e8a47ed343ab61c691c1973b17e742/test/test_sence.py#L18
+ async def face_detect(self, timeout=10):
+ block: FaceDetect = FaceDetect(timeout=timeout)
+ # response: FaceDetectResponse
+ (resultType, response) = await block.execute()
+ logger.debug(f'test_face_detect result: {response}')
+
+ assert resultType == MiniApiResultType.Success, 'face_detect timetout'
+ assert response is not None and isinstance(response, FaceDetectResponse), 'face_detect result unavailable'
+ assert response.isSuccess, 'face_detect failed'
+
+ return response.count # 人脸个数
+
+ async def face_analysis(self, timeout=10):
+ # https://github.com/marklogg/mini_demo/blob/42cacfa5c8e8a47ed343ab61c691c1973b17e742/test/test_sence.py#L43
+ block: FaceAnalysis = FaceAnalysis(timeout=timeout)
+ # response: FaceAnalyzeResponse
+ (resultType, response) = await block.execute()
+
+ logger.debug(f'test_face_analysis result: {response}')
+ # print('code = {0}, error={1}'.format(response.resultCode, errors.get_vision_error_str(response.resultCode)))
+
+ assert resultType == MiniApiResultType.Success, 'face_analysis timetout'
+ assert response is not None and isinstance(response, FaceAnalyzeResponse), 'face_analysis result unavailable'
+ assert response.isSuccess, 'face_analysis failed'
+ # gender: 小于50为女性,大于50为男性
+ return response # {"age": 24, "gender": 99, "height": 238, "width": 238}
+
+ async def face_recognise(self, timeout=10):
+ # https://github.com/marklogg/mini_demo/blob/42cacfa5c8e8a47ed343ab61c691c1973b17e742/test/test_sence.py#L182
+ # response : FaceRecogniseResponse
+ (resultType, response) = await FaceRecognise(timeout=timeout).execute()
+
+ logger.debug(f'face_recognise result: {response}')
+
+ assert resultType == MiniApiResultType.Success, 'face_recognise timetout'
+ assert response is not None and isinstance(response,
+ FaceRecogniseResponse), 'face_recognise result unavailable'
+ assert response.isSuccess, 'face_recognise failed'
+ return response.faceInfos # id name
+
+ # 测试获取红外探测距离
+ async def get_infrared_distance(self):
+ (resultType, response) = await GetInfraredDistance().execute()
+
+ # print(f'test_get_infrared_distance result: {response}')
+
+ assert resultType == MiniApiResultType.Success, 'get_infrared_distance timetout'
+ assert response is not None and isinstance(response,
+ GetInfraredDistanceResponse), 'get_infrared_distance result unavailable'
+ assert response.distance > 0, 'get_infrared_distance failed'
+ return response.distance
+
+ # 物体识别
+ async def recognise_gesture(self, timeout=10):
+ """测试物体(手势)识别
+ """
+ # object_type: 支持FLOWER, FRUIT, GESTURE 三类物体
+ block: ObjectRecognise = ObjectRecognise(object_type=ObjectRecogniseType.GESTURE, timeout=timeout)
+ # response : RecogniseObjectResponse
+ (resultType, response) = await block.execute()
+
+ logger.debug(f'recognise_gesture result: {response}')
+
+ assert resultType == MiniApiResultType.Success, 'recognise_gesture timetout'
+ assert response is not None and isinstance(response,
+ RecogniseObjectResponse), 'recognise_gesture result unavailable'
+ assert response.isSuccess, 'recognise_gesture failed'
+ return response.objects
+
+ async def recognise_fruit(self, timeout=10):
+ """测试物体(水果)识别
+ """
+ # object_type: 支持FLOWER, FRUIT, GESTURE 三类物体
+ block: ObjectRecognise = ObjectRecognise(object_type=ObjectRecogniseType.FRUIT, timeout=timeout)
+ # response : RecogniseObjectResponse
+ (resultType, response) = await block.execute()
+
+ logger.debug(f'test_object_recognise_fruit result: {response}')
+
+ assert resultType == MiniApiResultType.Success, 'recognise_fruit timetout'
+ assert response is not None and isinstance(response,
+ RecogniseObjectResponse), 'recognise_fruit result unavailable'
+ assert response.isSuccess, 'recognise_fruit failed'
+ return response.objects
+
+ # 语音识别
+ # https://github.com/marklogg/mini_demo/blob/42cacfa5c8e8a47ed343ab61c691c1973b17e742/test/test_event.py#L16
+
+class MiniExtension(AdapterNodeAio):
+ NODE_ID = "eim/node_alphamini"
+ HELP_URL = "https://adapter.codelab.club/extension_guide/node_alphamini/"
+ DESCRIPTION = "悟空是一只伪装成机器人的猴子"
+ VERSION = "1.2.0"
+
+ def __init__(self, **kwargs):
+ super().__init__(logger=logger, **kwargs)
+ self.thing = RobotProxy(self) # create robot proxy object
+
+ async def run_python_code(self, code):
+ try:
+ output = await eval(
+ code,
+ {"__builtins__": None},
+ {
+ # "api_instance": self.thing.api_instance,
+ "robot": self.thing
+ })
+ except Exception as e:
+ # todo 完整错误
+ # logger.exception('what?')
+ output = e
+ return output
+
+ async def extension_message_handle(self, topic, payload):
+ # todo 判断是否连接成功,否则报告连接问题
+
+ logger.info(f'code: {payload["content"]}')
+ # message_id = payload.get("message_id")
+ python_code = payload["content"]
+ output = await self.run_python_code(python_code)
+ payload["content"] = str(output)
+ message = {"payload": payload}
+ await self.publish(message)
+
+ # release robot proxy object
+ async def terminate(self, **kwargs):
+ if self.thing.is_connected:
+ await self.thing.disconnect()
+ await super().terminate(**kwargs)
+
+
+def main(**kwargs):
+ try:
+ node = MiniExtension(**kwargs)
+ asyncio.run(node.receive_loop())
+ except KeyboardInterrupt:
+ if node._running:
+ asyncio.run(node.terminate())
+
+if __name__ == "__main__":
+ main()
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/node_blender.py b/docs/extensions_nodes_mirrors/node_blender.py
index acca811..63aa3a9 100644
--- a/docs/extensions_nodes_mirrors/node_blender.py
+++ b/docs/extensions_nodes_mirrors/node_blender.py
@@ -33,9 +33,6 @@ def extension_message_handle(self, topic, payload):
message = {"payload": payload}
self.publish(message)
- def exit_message_handle(self, topic, payload):
- self.terminate()
-
@threaded
def run(self):
while self._running:
diff --git a/docs/extensions_nodes_mirrors/node_cozmo.py b/docs/extensions_nodes_mirrors/node_cozmo.py
index 0c9b487..516fe43 100644
--- a/docs/extensions_nodes_mirrors/node_cozmo.py
+++ b/docs/extensions_nodes_mirrors/node_cozmo.py
@@ -2,68 +2,114 @@
usage:
python cozmo_server.py
+多台机器人
+ https://github.com/anki/cozmo-python-sdk/blob/dd29edef18748fcd816550469195323842a7872e/examples/multi_robot/multi_robot_unified.py
+ 默认采用优先发现原则 https://github.com/anki/cozmo-python-sdk/blob/dd29edef18748fcd816550469195323842a7872e/src/cozmo/run.py#L400
ref:
https://github.com/anki/cozmo-python-sdk/blob/master/examples/apps/remote_control_cozmo.py#L335
+
+get status
+ https://github.com/wwj718/calypso/blob/master/server.py#L353
+
+调试
+ https://github.com/anki/cozmo-python-sdk/blob/master/examples/apps/cli.py
'''
import queue
+import json
import time
-import importlib
-from loguru import logger
from codelab_adapter_client import AdapterNode
-from codelab_adapter_client.utils import get_or_create_node_logger_dir, install_requirement
-# import os
-# logger.warning(dict(os.environ))
-# log for debug
-node_logger_dir = get_or_create_node_logger_dir()
-debug_log = str(node_logger_dir / "debug.log")
+from codelab_adapter_client.utils import install_requirement
+from codelab_adapter_client.thing import AdapterThing
+from codelab_adapter_client.utils import threaded
+
+import cozmo
+from cozmo.util import degrees, distance_mm, speed_mmps, Pose
+from codelab_adapter_client.config import settings
+from loguru import logger
+debug_log = str(settings.NODE_LOG_PATH / "cozmo.log")
logger.add(debug_log, rotation="1 MB", level="DEBUG")
-class CozmoNode(AdapterNode):
- NODE_ID = "eim/node_cozmo"
- WEIGHT = 100
- HELP_URL = "https://adapter.codelab.club/extension_guide/cozmo/"
- VERSION = "1.2.1"
- DESCRIPTION = "最好的 AI 教育机器人之一"
- REQUIREMENTS = ["cozmo"]
+class CozmoProxy(AdapterThing):
+ def __init__(self, node_instance):
+ super().__init__(thing_name="Cozmo", node_instance=node_instance)
+ self.disconnect_flag = False
- def __init__(self):
- super().__init__(logger=logger)
- self.q = queue.Queue()
+ def _say_hi(self, robot):
+ # pass
+ # robot.say_text("hi").wait_for_completed()
+ pass
- def _import_requirement_or_import(self):
- requirement = self.REQUIREMENTS
+ def list(self, timeout=5) -> list:
+ if self.thing:
+ # 检查是否连接正常
+ return ["Cozmo"]
try:
- importlib.import_module("cozmo")
- except ModuleNotFoundError:
- self.pub_notification(f'try to install {" ".join(requirement)}...')
- install_requirement(requirement)
- self.pub_notification(f'{" ".join(requirement)} installed!')
- importlib.import_module("cozmo")
- import cozmo
- from cozmo.util import degrees, distance_mm, speed_mmps
- global cozmo, degrees, distance_mm, speed_mmps # make it global
+ # message id返回
+ cozmo.run_program(self._say_hi) # 联通性测试!
+ return ["Cozmo"]
+ except: # 不能加Exception 协程
+ # cozmo 有问题? 如果正常连接呢?
+ # self.node_instance.logger.error()
+ self.node_instance.pub_notification("未发现 Cozmo",
+ type="ERROR")
+ # self.node_instance.terminate()
+ return []
- def extension_message_handle(self, topic, payload):
- self.q.put(payload)
+ @threaded
+ def _connect(self):
+ # RuntimeError: This event loop is already running
+ cozmo.run_program(self.cozmo_program)
+ # todo 需要在主线程打开
+ # cozmo.run_program(self.cozmo_program, use_3d_viewer=True, use_viewer=True)
+ '''
+ try:
+ # 阻塞
+ except:
+ self.thing = None # ??
+ '''
+
+ def connect(self, ip, timeout=5):
+ if self.thing:
+ # 之前连过
+ return
+ self.is_connected = True
+ self._connect()
+ time.sleep(0.5)
- def exit_message_handle(self, topic, payload):
- self.terminate()
+ def status(self, **kwargs) -> bool:
+ pass
+ def disconnect(self):
+ # self.node_instance
+ self.node_instance.pub_notification(f'{self.node_instance.NODE_ID} 已断开', type="WARNING")
+ if self.thing:
+ try:
+ self.thing.say_text("see you later").wait_for_completed()
+ except Exception as e:
+ self.node_instance.logger.error(str(e))
+ self.thing = None
+ self.is_connected = False
+ self.disconnect_flag = True
+ time.sleep(0.1) # 等待检测
+ self.disconnect_flag = False
+ # self.node_instance.terminate() # 断开 重复连接cozmo可能有问题
+
+ # 业务
def pub_event(self, event_name, event_param=""):
- message = self.message_template()
+ message = self.node_instance.message_template()
message["payload"]["message_type"] = "device_event"
message["payload"]["content"] = {
"event_name": event_name,
"event_param": event_param
}
- self.publish(message)
+ self.node_instance.publish(message)
def onObjectTapped(self, evt, obj, **kwargs):
# 事件数量巨大
object_id = obj.object_id
- self.logger.debug(object_id)
+ self.node_instance.logger.debug(object_id)
event_name = "ObjectTapped"
event_param = object_id
self.pub_event(event_name, event_param)
@@ -95,18 +141,18 @@ def onObjectMovingStarted(self, evt, obj, **kwargs):
# face
def onFaceAppeared(self, evt, face, **kwargs):
event_name = "FaceAppeared"
- self.logger.debug(face.name)
- self.logger.debug(face.known_expression)
+ self.node_instance.logger.debug(face.name)
+ self.node_instance.logger.debug(face.known_expression)
event_param = face.known_expression
self.pub_event(event_name, event_param)
def onFaceObserved(self, evt, face, **kwargs):
# expression -> FACIAL_EXPRESSION_HAPPY("happy")
event_name = "FaceObserved"
- self.logger.debug(face.name)
- self.logger.debug(face.known_expression)
+ self.node_instance.logger.debug(face.name)
+ self.node_instance.logger.debug(face.known_expression)
event_param = face.known_expression
- self.logger.debug(
+ self.node_instance.logger.debug(
f'face name -> {face.name}, face expression -> {face.known_expression}'
)
if event_param:
@@ -120,29 +166,29 @@ def onFaceDisappeared(self, evt, face, **kwargs):
# pets
def onPetAppeared(self, evt, pet, **kwargs):
# 与face机制不一致
- self.logger.debug("PetAppeared")
- self.logger.debug(pet.pet_type)
+ self.node_instance.logger.debug("PetAppeared")
+ self.node_instance.logger.debug(pet.pet_type)
event_name = "PetAppeared"
event_param = pet.pet_type
self.pub_event(event_name, event_param)
def onPetObserved(self, evt, pet, **kwargs):
- self.logger.debug("PetObserved")
- self.logger.debug(pet.pet_type)
+ self.node_instance.logger.debug("PetObserved")
+ self.node_instance.logger.debug(pet.pet_type)
event_name = "PetObserved"
event_param = pet.pet_type
self.pub_event(event_name, event_param)
def onPetDisappeared(self, evt, pet, **kwargs):
- self.logger.debug("PetDisappeared")
- self.logger.debug(pet.pet_type)
+ self.node_instance.logger.debug("PetDisappeared")
+ self.node_instance.logger.debug(pet.pet_type)
event_name = "PetDisappeared"
event_param = pet.pet_type
self.pub_event(event_name, event_param)
def onRobotObservedMotion(self, evt, **kwargs):
event_name = "RobotObservedMotion" # EvtRobotObservedMotion
- logger.debug(event_name)
+ self.node_instance.logger.debug(event_name)
self.pub_event(event_name)
def cozmo_program(self, robot):
@@ -153,6 +199,10 @@ def cozmo_program(self, robot):
cozmo.world.EvtNewCameraImage
'''
# Object
+ self.thing = robot
+ self.node_instance.pub_notification("Cozmo 已连接", type="SUCCESS")
+ robot.say_text("hi").wait_for_completed()
+ # robot.enable_facial_expression_estimation(enable=True)
robot.add_event_handler(cozmo.objects.EvtObjectTapped,
self.onObjectTapped)
# ObjectObserved 发送频率非常高 会导致冲刷缓存变量(todo 优化 js extension 消息接收机制)
@@ -165,7 +215,13 @@ def cozmo_program(self, robot):
robot.add_event_handler(cozmo.objects.EvtObjectMovingStarted,
self.onObjectMovingStarted)
- # face
+ # face todo 启动人脸识别 enable
+ '''
+ 表情 启动
+ http://cozmosdk.anki.com/docs/generated/cozmo.robot.html#cozmo.robot.Robot.enable_facial_expression_estimation
+ robot.enable_facial_expression_estimation(enable=True)
+ http://cozmosdk.anki.com/docs/generated/cozmo.faces.html#cozmo.faces.FACIAL_EXPRESSION_UNKNOWN
+ '''
robot.add_event_handler(cozmo.faces.EvtFaceAppeared,
self.onFaceAppeared)
robot.add_event_handler(cozmo.faces.EvtFaceObserved,
@@ -182,35 +238,97 @@ def cozmo_program(self, robot):
# world Camera
# robot.add_event_handler(cozmo.camera.EvtRobotObservedMotion, self.onRobotObservedMotion)
- self.pub_notification("Cozmo Connected!", type="SUCCESS")
- while self._running:
- time.sleep(0.05)
- if not self.q.empty():
- payload = self.q.get()
- self.logger.info(f'python: {payload}')
- message_id = payload.get("message_id")
+ while self.node_instance._running:
+ if self.disconnect_flag:
+ # self.thing = None
+ # self.is_connected = False
+ break
+ time.sleep(0.1)
+ # 消息取来在内部运行
+ '''
+ if not self.node_instance.q.empty():
+ payload = self.node_instance.q.get()
+ # self.node_instance.logger.info(f'python: {payload}')
python_code = payload["content"]
-
try:
output = eval(python_code, {"__builtins__": None}, {
+ "robot": robot,
"cozmo": cozmo,
- "robot": robot
})
except Exception as e:
output = e
- self.pub_notification(str(e), type="ERROR")
+ self.node_instance.pub_notification(str(e), type="ERROR")
payload["content"] = str(output)
message = {"payload": payload}
self.publish(message)
+ # 把 message id 丢出去
+ '''
+
+
+class CozmoNode(AdapterNode):
+ NODE_ID = "eim/node_cozmo"
+ WEIGHT = 100
+ HELP_URL = "https://adapter.codelab.club/extension_guide/cozmo/"
+ VERSION = "2.1.0" # 支持表情
+ DESCRIPTION = "最好的 AI 教育机器人之一"
+
+ def __init__(self, **kwargs):
+ super().__init__(logger=logger, **kwargs)
+ # self.q = queue.Queue()
+ self.thing = CozmoProxy(self)
+
+ def extension_message_handle(self, topic, payload):
+ python_code = payload["content"]
+ # if python_code.startswith("robot."):
+ # self.q.put(payload)
+ try:
+ output = eval(
+ python_code,
+ {"__builtins__": None},
+ {
+ # "robot": robot,
+ "list": self.thing.list,
+ "connect": self.thing.connect,
+ "disconnect": self.thing.disconnect,
+ "robot": self.thing.thing,
+ "cozmo": cozmo,
+ "degrees": degrees,
+ "distance_mm": distance_mm,
+ "speed_mmps": speed_mmps,
+ "Pose": Pose,
+ "dir": dir,
+ "help": help
+ })
+ except Exception as e:
+ output = e
+ self.pub_notification(str(e), type="ERROR")
+ try:
+ output = json.dumps(output) # 单引号 json
+ except Exception:
+ output = str(output)
+ payload["content"] = str(output)
+ message = {"payload": payload}
+ self.publish(message)
def run(self):
- self._import_requirement_or_import()
- cozmo.run_program(self.cozmo_program)
+ while self._running:
+ # "robot": self.thing.thing,
+ if self.thing.thing and not self.thing.thing.world.conn.is_connected:
+ self.logger.debug(f"conn: {self.thing.thing.world.conn.is_connected}")
+ # self.thing.disconnect()
+ self.terminate()
+ self.logger.debug("go on...")
+ time.sleep(0.5)
+ # 发现,已经连接了,如果无法发现则说明有问题
+ # 利用 except 知道不存在 list
+ def terminate(self, **kwargs):
+ super().terminate(**kwargs)
-if __name__ == "__main__":
+
+def main(**kwargs):
try:
- node = CozmoNode()
+ node = CozmoNode(**kwargs)
node.receive_loop_as_thread()
node.run()
except KeyboardInterrupt:
@@ -220,3 +338,7 @@ def run(self):
node.pub_notification(str(e), type="ERROR")
time.sleep(0.05)
node.terminate() # Clean up before exiting.
+
+
+if __name__ == "__main__":
+ main()
\ No newline at end of file
diff --git a/docs/extensions_nodes_mirrors/node_digimon.py b/docs/extensions_nodes_mirrors/node_digimon.py
new file mode 100644
index 0000000..ba0cc9f
--- /dev/null
+++ b/docs/extensions_nodes_mirrors/node_digimon.py
@@ -0,0 +1,120 @@
+'''
+fork from node_webserver_flask
+'''
+import time
+import os
+import sys
+import webbrowser
+from loguru import logger
+from codelab_adapter_client import AdapterNode
+from codelab_adapter_client.utils import get_or_create_node_logger_dir, install_requirement, threaded, get_local_ip, send_simple_message
+from flask import Flask
+from flask import request
+
+# log for debug
+node_logger_dir = get_or_create_node_logger_dir()
+debug_log = str(node_logger_dir / "debug.log")
+logger.add(debug_log, rotation="1 MB", level="DEBUG")
+
+app = Flask(__name__)
+
+
+@app.route('/')
+def hello_world():
+ return 'Hello, 被选召的孩子!'
+
+
+@app.route('/digimon')
+def digimon():
+ # queue to adapter
+ name = request.args.get('name', default=None)
+ # send
+ send_simple_message(f'digimon {name}')
+ # logger.debug
+ digimon_info = {
+ "microbit": {
+ "name": "micro:bit",
+ "img": "https://img/",
+ },
+ "cozmo": {
+ "name": "Cozmo",
+ "description": "拥有惊人的灵活性,像微缩版的瓦力,性格阴晴不定,做游戏时喜欢耍小聪明",
+ "img": "https://scratch3-files.just4fun.site/cozmo-gif.gif",
+ "url": "https://adapter.codelab.club/extension_guide/cozmo/"
+ },
+ "alphamini": {},
+ "codelab": {},
+ "mushrooms":{},
+ }
+
+ return f'''
+
+
+
+
+
+
++++ {digimon_info.get(name).get('description')} +
+
+ {digimon_info.get(name).get('name')}
+
+
+ Anki
+
+  +
## 启动 CodeLab Adapter 后,与 scratch3 无法通信怎么办?
-检查下是不是打开了科学上网的软件。
+检查下是不是打开了科学上网的软件, 不要使用全局模式。
## CodeLab Adapter 可以支持其他平台吗?
@@ -62,7 +62,7 @@ CodeLab Adapter 可以支持其他编程平台吗?而不只是在 CodeLab 的
CodeLab Adapter 几乎支持任何平台,无论是 Scratch 3.0 构建的还是 blockly 构建的(如 Tynker 和 code.org)的,或者你用其他什么黑魔法构建的,都没问题!
-这是目前的接入文档:[codelab-adapter 支持第三方平台](https://blog.just4fun.site/post/少儿编程/codelab-adapter-open-plan/)。
+这是目前的接入文档:[codelab-adapter 支持第三方平台](https://wwj718.github.io/post/少儿编程/codelab-adapter-open-plan/)。
相关的合作条款我们正在构建中。
@@ -70,24 +70,33 @@ CodeLab Adapter 几乎支持任何平台,无论是 Scratch 3.0 构建的还是
来信请注明公司/组织的一些基本信息,以及你们正在做的事情 :)
-## Python 版本(CodeLab Adapter 3.0.0)
+## Python 版本(CodeLab Adapter 4.9.5)
我们在不同操作系统打包时,使用的 Python 版本不同。
-- Windows:3.7.4
-- macOS:3.7.2
-- Raspbian:3.7.3
-- Ubuntu:3.7.5
+- Windows:3.7.6
+- macOS:3.8.7
+- Raspbian:3.7
+- Ubuntu:3.7
+
+详情可以查看WebUI菜单里的 `环境 > 查看`
## 如何使用 Python 拓展 Scratch 的能力?
-- [json message](/dev_guide/json-message/)。
-- 参考[使用 Python 拓展 Scratch 的能力](https://blog.just4fun.site/scratch-adapter-eim-script.html#_4)。
+- [Python对象的连接器:EIM 插件](/project_tutorial/eim_pt/)
+- [hello world(Adapter Extension)](/dev_guide/helloworld/)
+- [Adapter Node](/dev_guide/Adapter-Node/)
-## 如何找到 Adapter 主目录
+## 如何找到 Adapter 主目录(以Adapter 4.9.5为例)
Adapter 主目录,也是 Adapter 的日志目录,这儿存放了 Adapter 运行时使用的数据。
-Mac/Linux 用户的 Adapter 主目录在:`~/codelab_adapter`,如果找不到插件目录(如 Windows 用户),可以通过 CodeLab Adapter Web UI 工具栏里的`插件->打开插件目录`打开它。
+Windows 和 Mac,数据都在软件内部。
+
+* Windows: `codelab-adapter-4_9_5-win64/src/adapter_home`
+* Mac: `codelab-adapter-4_9_5-mac.app/Contents/Resources/adapter_home`
+* Linux: `~/codelab_adapter`
+
+如果找不到插件目录(如 Windows 用户),可以通过 CodeLab Adapter Web UI 工具栏里的`插件->打开插件目录`打开它。
## 如何找到插件目录
@@ -107,49 +116,29 @@ Windows 用户如果找不到用户配置文件目录,可以通过 CodeLab Ada
## 目前都支持哪些插件
-[extensions_v2](https://github.com/CodeLabClub/codelab_adapter_extensions/tree/master/extensions_v2)。
+[codelab_adapter_extensions](https://github.com/CodeLabClub/codelab_adapter_extensions)。
## 支持移动端吗(iPad/手机)
-支持。
-
-这是一个[例子](/video/codelab_ipad.mp4)。
-
-## 如何开机自启
-从 2.6.2 开始, 支持 headless 模式([点击下载 Raspbian 版本](/video/codelab-adapter-rpi-2_6_2.zip)),用于开机自启、无人值守的环境。
+Adapter 无法直接运行在移动端(可以运行在安卓的linux模拟器(如Termux)上)
-```
-chmod +x codelab-adapter
-./codelab-adapter --cli
-```
+在移动端上使用 Adapter 的方式是,将 Adapter 运行在计算机(如树莓派)上,之后通过url参数指向它: `https://scratch-beta.codelab.club/?adapter_host=192.168.31.140`
-推荐配置为:
+但由于不同平台对 https 的限制策略不同,可能需要一些处理技巧。
-```python
-# doc: https://adapter.codelab.club/user_guide/settings/
-OPEN_MESSAGE_HUB = True
-USE_SSL = False
-AUTO_OPEN_WEBUI = False
-PYTHON3_PATH = None
-DEFAULT_ADAPTER_HOST = "codelab-adapter.codelab.club"
-OPEN_WEBSOCKET_API = True
-OPEN_REST_API = False
-TOKEN = "ls3fb138c4124027"
-```
-
-之后打开 `http://raspberrypi.local:12358/?token=ls3fb138c4124027`
+这是一个[例子](/video/codelab_ipad.mp4)。
## 自定义存储目录
-2.6.3 开始支持这项功能。
使用环境变量`ADAPTER_HOME_PATH`来软件 home 目录,
例子:`ADAPTER_HOME_PATH=/tmp/my_adapter_home ./codelab-adapter --cli`
## 离线使用
-CodeLab Adapter 支持离线使用,目前有 2 种方式使用它。
+CodeLab Adapter 支持离线使用,目前有 3 种方式使用它。
- 1. 配合 [CodeLab Scratch Desktop(离线版)](https://www.codelab.club/blog/2020/08/20/tools/)使用。
- 2. 将 Web UI 里的`codelab-adapter.codelab.club`替换为`127.0.0.1`,形如 `https://codelab-adapter.codelab.club:12358/?token=YOUR_TOKEN`,重新刷新页面。
+1. (推荐) 修改host,添加一条`127.0.0.1 codelab-adapter.codelab.club` , [详情](#codelab-adapter_3)
+2. 配合 [CodeLab Scratch Desktop(离线版)](https://www.codelab.club/blog/2020/08/20/tools/)使用。
+3. 将 Web UI 里的`codelab-adapter.codelab.club`替换为`127.0.0.1`,形如 `https://codelab-adapter.codelab.club:12358/?token=YOUR_TOKEN`,重新刷新页面。
推荐使用`方法 1`。
@@ -157,7 +146,7 @@ CodeLab Adapter 支持离线使用,目前有 2 种方式使用它。
## 查看本地环境
-
+
你将看到:
@@ -175,20 +164,17 @@ CodeLab Adapter 支持离线使用,目前有 2 种方式使用它。
CodeLab Adapter 有很好的分布式支持:
-1. [Adapter Node](https://adapter.codelab.club/dev_guide/Adapter-Node/) 可以与 CodeLab Adapter 分布式协同
+1. [Adapter Node](/dev_guide/Adapter-Node/) 可以与 CodeLab Adapter 分布式协同
2. CodeLab Adapter 可以与 Scratch 分布式协同
为了解决 **树莓派里运行 Scratch 比较卡** 的问题,我们 可以让Adapter 运行在树莓派里,Scratch 则运行在本机上。
首先在树莓派中运行CodeLab Adapter,复制 WebUI 的URL, 形如: `https://codelab-adapter.codelab.club:12358/?token=765b3d2901ef47a0`
-
-
将 codelab-adapter.codelab.club 修改为 树莓派的 IP 地址: `https://192.168.21.104:12358/?token=765b3d2901ef47a0`。
现在你可以在 PC 里打开 树莓派里的 Adapter(需要安全校验) :
-
接着让我们在 CodeLab Scratch 里使用它, 打开: `https://scratch-beta.codelab.club/?adapter_host=192.168.21.104` (adapter_host 是 adapter 所在计算机的 IP,即树莓派的 IP, 它甚至可以运行在互联网的任何设备,任何位置!包括手机!)
@@ -204,11 +190,86 @@ CodeLab Adapter 有很好的分布式支持:
添加如下host规则:
-`codelab-adapter.codelab.club 127.0.0.1`
+`127.0.0.1 codelab-adapter.codelab.club`
以下是不同系统的hosts文件所在位置
* Windows: `C:\Windows\System32\drivers\etc\hosts`
* Android: `/system/etc/hosts`
* Mac/Linux: `/etc/hosts`
-* iPhone: `/etc/hosts`
\ No newline at end of file
+* iPhone: `/etc/hosts`
+
+## Windows 系统常见文件
+
+### 提示`缺少Python3`
+
+可能是你把 Adapter 当到了带有 **空格** 的文件夹里了。
+
+## 如何获取文件路径
+以下是windows 10 下的操作: `右键目标文件 -> 属性`
+
+
+
+## 为何有些网络下会无法Adapter发现/连接wifi设备
+这种情况,可能发生在wifi设备(悟空机器人、Romomaster EP)
+
+当你换一个网络就可用时, 那么问题可能是在某个网络启动Adapter,系统询问你是否允许其连接公共网络,你没有同意。
+
+可能的操作方法为: [Win10系统禁止/恢复某个程序连接网络的方法](https://jingyan.baidu.com/article/22a299b5e6fa909e18376a55.html)
+
+允许 adapter 内置的Python连网络(Python路径可在WebUI中看到)
+
+## 如何排查 无法发现设备 的问题?
+
+打开Adapter内置的 jupyterlab 插件,打开 `notebooks目录 > devices-connect-test.ipynb`,测试对应设备的连接,如果此处显示 **发现** 设备,但Adapter插件无法与设备连接,说明是Adapter插件问题,请[给我们反馈bug, 最好配上截图或视频](https://discuss.codelab.club/); 如果此处显示 **未发现** 设备,则与Adapter无关,请检查你的网络、USB连接、以及设备是否正常。
+
+## MacOS 应用程序没有响应
+如果你遇到以下情况
+
+
+
+可以通过以下方式重新打开Adapter: `右键 -> 显示包内容 -> Contents -> MacOS -> CodeLab-Adapter`
+
+
+
+点击运行目录里的 CodeLab-Adapter
+
+
+
+如果因此导致无法关机, `control + command + 电源键` 或者 `长按电源键`
+
+## webUI 无法退出Adapter (token错误)
+### MacOS
+
+
+### Windows
+图标在页面右下角, 右键退出。
+
+### Linux & RPI
+`pkill -f codelab-adapter`
+
+## 之前安装过旧版本的Adapter,使用新的版本出现问题
+
+下载最新的 Adapter
+
+
+
+
+
+## MacOS 11 无法扫描蓝牙设备
+现象: 使用蓝牙设备(诸如overdrive) ,系统会提示蓝牙未开启。
+
+原因: MacOs 权限管理更为严格,需要授权。
+
+解决方案: 从软件包里打开 Adapter,然后授权。
+
+可以通过以下方式重新打开Adapter: `右键 -> 显示包内容 -> Contents -> MacOS -> CodeLab-Adapter`
+
+
+
+点击运行目录里的 CodeLab-Adapter
+
+
+
+## windows 32bit 版本
+[winFull.zip(4_9_3)](https://scratch3-files.just4fun.site/codelab-adapter-4_9_3-win-fix.zip)
\ No newline at end of file
diff --git a/docs/user_guide/Linda.md b/docs/user_guide/Linda.md
new file mode 100644
index 0000000..5344707
--- /dev/null
+++ b/docs/user_guide/Linda.md
@@ -0,0 +1,379 @@
+# Linda
+
+
+
+用于协调不同的程序,使它们进行协作。
+
+!!! 提醒
+ 在 **Adapter >= 4.0** 中可用。
+
+
+
+# 介绍
+
+CodeLab Adapter 4.0 内置了 Linda server(Tuple Space),目前我们提供了以下客户端(持续增加中...)与 Linda Tuple Space 交互:
+
+- [Python Client](#python-client)
+- [Scratch Client](#scratch-client)
+- [REST API](#rest-api)
+- [cli (命令行客户端)](#cli)
+- [JavaScript Client(开发者)](#javascript-client)
+- [mush-lang](#mush-lang)
+
+Linda 最有趣的一个地方是,所有 Tuple Space 参与者(跨语言、跨系统、跨网络)都能够互操作,语义由参与者自己"协调", 所以 Alan Kay 将 Linda 称为"协调语言"。
+
+# 基本操作(operate)
+
+### 核心操作
+* out: 生成一个元组(tuple) 到 元组空间(tuple space)
+* in: 在tuple space中匹配元组,如果匹配到则消耗它, 如果未匹配则一直等待
+ * inp: in的非阻塞版本。 如果匹配到则消耗它, 如果未匹配则返回空元组
+* rd: read only, 在tuple space中匹配元组,如果匹配到则返回它(不移除), 如果未匹配则一直等待
+ * rdp: 非阻塞版本的 rd
+* eval: 暂不考虑实现
+
+### 辅助操作
+不在 linda 的原始论文中,是我自己的扩展
+
+* dump: 获取元组空间所有元组
+* status: 获取元组空间状态
+* reboot: 重置元组空间
+ * reboot 将重置元组空间,确保执行这个操作时,没有任何其他 linda client ,否则,此前的 linda 操作将一直处于等待中。
+
+
+# Python Client
+!!!提醒
+ 已经内置在完整版(Windows/macOS)里, 打开 Jupyterlab 即可使用。
+
+安装依赖: `pip install codelab_adapter_client`
+
+
+提供同步和异步两种基类:
+
+- AdapterNode
+- AdapterNodeAio
+
+## AdapterNode
+
+```python
+import time
+from codelab_adapter_client import AdapterNode
+
+class MyNode(AdapterNode):
+ NODE_ID = "linda/test"
+
+ def __init__(self):
+ super().__init__()
+
+node = MyNode()
+node.receive_loop_as_thread()
+time.sleep(0.1) # 等待zmq通信管道建立完成
+```
+
+创建Adapter Node之后,就可以通过node使用linda了。
+
+```python
+res = node.linda_reboot() # reboot linda server, clean tuple space
+assert res == []
+
+res = node.linda_out([1, 2, 3]) # out
+assert res == [1, 2, 3]
+
+res = node.linda_out([1, 2, 4]) # out
+res = node.linda_dump()
+assert res == [[1, 2, 3], [1, 2, 4]]
+
+res = node.linda_rd([1, 2, 3]) # read and blocking
+assert res == [1, 2, 3]
+
+res = node.linda_rdp([1, 2, "*"]) # read but non-blocking
+assert res == [1, 2, 3] # 先入先出
+
+res = node.linda_in([1,2,3]) # read then remove (blocking)
+assert res == [1, 2, 3]
+```
+
+## AdapterNodeAio(异步)
+
+同步和异步 API 保持一致
+
+```python
+import asyncio
+from codelab_adapter_client import AdapterNodeAio
+
+class MyNode(AdapterNodeAio):
+ NODE_ID = "linda/test"
+
+ def __init__(self):
+ super().__init__()
+
+# 以下代码在 jupyter 中运行,如果你想在python脚本中使用,请考虑异步代码的生命周期,参考: https://github.com/CodeLabClub/codelab_adapter_client_python/blob/master/tests/test_linda_client.py#L26
+node = MyNode()
+task = asyncio.create_task(node.receive_loop())
+await asyncio.sleep(0.1) # !! 等待zmq通信管道建立完成
+
+_tuple = ["test_linda"]
+
+# reboot
+res = await node.linda_reboot()
+assert res == []
+
+# out
+_tuple = ["hello", "world"]
+await node.linda_out(_tuple)
+
+# rdp
+res = await node.linda_rdp(_tuple)
+assert res == _tuple
+
+# inp
+res = await node.linda_inp(_tuple)
+assert res == _tuple
+
+res = await node.linda_dump()
+assert res == []
+```
+
+更多用法参考测试文件: [test_linda_client.py](https://github.com/CodeLabClub/codelab_adapter_client_python/blob/master/tests/test_linda_client.py)
+
+# Scratch Client
+
+
+
+
+
+# REST API
+
+使用 [httpie](https://httpie.io/docs#non-string-json-fields) 作为客户端。`:=` 表示后边跟的是 json 数据
+
+## out
+
+`http post https://codelab-adapter.codelab.club:12358/api/linda operate=out tuple:='["hello", "linda"]'`
+
+## in
+
+`http post https://codelab-adapter.codelab.club:12358/api/linda operate=in tuple:='["hello", "linda"]'`
+
+## dump
+
+`http post https://codelab-adapter.codelab.club:12358/api/linda operate=dump`
+
+其他原语类似
+
+## cli (命令行客户端)
+
+```bash
+pip install https://github.com/CodeLabClub/codelab_adapter_client_python/archive/master.zip
+# pip install codelab_adapter_client --upgrade # 暂未更新到 pypi
+codelab-linda --help
+
+codelab-linda out --help
+
+# reboot
+codelab-linda reboot
+
+# dump
+codelab-linda dump
+
+# out
+codelab-linda out --data '[1, "hello"]'
+
+# rd
+codelab-linda rd --data '[1, "hello"]'
+codelab-linda rd --data '[1, "*"]'
+
+# rdp
+codelab-linda rd --data '[1, 2, 3]' # []
+
+# in
+codelab-linda rd --data '[1, "*"]'
+```
+
+# JavaScript Client
+方便开发者,将 Linda 引入自己的web项目。
+
+CodeLab 目前使用 JavaScript Client,将 Linda 带入 CodeLab Scratch、CodeLab Adapter WebUI 和 Lively。
+
+```js
+import AdapterBaseClient from "./codelab_adapter_base.js"; // https://github.com/CodeLabClub/scratch3_eim/blob/v3/codelab_adapter_base.js
+let NODE_ID = "linda/js/client";
+let HELP_URL = "https://adapter.codelab.club/user_guide/Linda/";
+let runtime = null;
+let adapter_client = new AdapterBaseClient(NODE_ID, HELP_URL, runtime);
+
+await adapter_client.linda_out([1,2,3]).then((data)=>{console.log("linda",data); return data})
+
+tuple = await adapter_client.linda_in(["hi", "lively", "*"]).then((data)=>{console.log("linda",data); return data})
+
+tuple = await adapter_client.linda_in(["hi", "python", "from Lively"]).then((data)=>{console.log("linda",data); return data})
+
+tuple = await adapter_client.linda_in(["hello", "lively", "*"]).then((data)=>{console.log("linda",data); return data})
+
+await adapter_client.linda_in([1,2,5], 1000).then((data)=>{console.log("linda",data); return data}) //超时
+```
+
+
+
+# mush-lang
+> LISP 是一种构建材料 -- Alan Kay
+
+为了更好地探索 Linda 的可能性,我们围绕 Linda 的基本原语,构建了一门简单的语言 -- [**mush-lang**](https://github.com/wwj718/mush-lang)。
+
+mush-lang 采用 LISP 风格的语法,可以视为 LISP 的一门玩具方言。 LISP 因其同构性(内外表示一致),可能是所有语言中最简单的。
+
+mush-lang 目前在 Python 中实现。
+
+
+
+# Demo
+
+
+## 多个 Scratch 角色 的 实时同步
+
+
+
+在 Python 的例子中,我们甚至在Scratch里构建了 Server!
+
+
+两个Scratch角色同步的代码如下
+
+* [linda-demo1](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/linda-demo1.sb3)
+* [linda-demo2](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/linda-demo2.sb3)
+
+
+python 与 Scratch 同步的代码如下:
+
+* [linda-demo1](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/linda-demo1.sb3)
+
+Python核心部分代码为:
+
+```python
+node.linda_out(["request", "loudness", "xxx"])
+node.linda_in(["response", "loudness", "*"])
+```
+
+
+## Jupyter 与 Scratch 的互操作
+
+
+跨语言对象之间的互操作
+
+用到了 jupyterlab 3.0 里的 ipywidgets.
+
+```python
+# 在jupyterlab 3.0中可用
+from ipywidgets import interact, interactive, fixed, interact_manual
+from codelab_adapter_client import AdapterNode
+import time
+
+class MyNode(AdapterNode):
+ NODE_ID = "linda/jupyter"
+
+ def __init__(self):
+ super().__init__()
+
+node = MyNode()
+node.receive_loop_as_thread()
+
+@interact(show=True, x=100, size=100)
+def f(show,x,size):
+ node.linda_out(["%%x", x], wait=False) # f函数是非阻塞的回调函数,使用wait=False参数,使node.linda_out使非阻塞的,此时相当于流,记得使用 message tuple(见下文)
+ node.linda_out(["%%show", show], wait=False)
+ node.linda_out(["%%size", size], wait=False)
+ return show,x,size
+```
+
+
+# 进阶
+## 消息风格
+linda 的基本观点是数据不停生灭(由用户显式操控)。
+
+如果我们想在 Linda 中实现 "消息/流" 的模式,可能会遇到tuple堆积(生产者太快)的问题(这是很严重的问题,似乎也不是正确使用linda的方式)
+
+为了尽可能少地破坏概念完整性,我们引入了一种特殊的tuple来支持"消息/流"模式。
+
+我们定义了一种叫做 message tuple 的 tuple,它像消息一样,每次只能流的瞬时截面: **一个数据**。
+
+以下是几个message tuple的例子:
+
+* ("%%x", 1)
+* ("%%y", 50)
+* ("%%z", "hello", "world")
+
+在语法层面,message tuple只是普通的tuple,唯一区别是第一个元素需要是如下风格字符串, "%%x", x可以是任意值,可以把它看作message tuple的id,不同id的message tuple被视为不同tuple,支持tuple的所有操作符。
+
+以下是一个例子:
+
+
+* [message_tuple demo](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/linda-message_tuple.sb3)
+
+
+!!!视角
+ 站在变量的视角,你可以将其看作全局变量
+
+
+# FAQ
+
+## 如何看到 Linda Tuple Space
+`Adapter >=4.1.0`
+
+
+
+
+
+## 在 Scratch 里有些 **in/rd** 积木一直阻塞
+简单而言,按照以下顺序运行程序:
+
+* 确保在linda in/rd 积木运行之前,先运行linda reboot
+* 之后在启动Scratch程序
+
+以下是原因分析(可以不看):
+
+这个Linda背后的实现有关,Adapter Linda 目前是C/S架构。Scratch中的 in/rd 积木实际上 promise。
+
+reboot针对的是linda server的操作。
+
+如果程序在 in/rd 的时候,被reboot,则客户端(Scratch)的 in/rd 对应的promise永远不会被解决。
+
+
+**linda reboot** 一下
+
+## 速度
+
+
+
+默认情况下,30帧/s。
+
+在Python客户端,通过修改参数,可以提高到300-600帧/s。
+
+```python
+class MyNode(AdapterNode):
+ NODE_ID = "linda/test"
+
+ def __init__(self):
+ super().__init__(recv_mode="block", bucket_fill_rate=1000, bucket_token=1000)
+```
+
+
+## Linda 与 EIM
+Linda 与 EIM 将长期共存,一个 Adapter Node,即是Linda client,也是EIM client,它们各有所擅。长期来看,我们更偏好 Linda。
+
+
+
+---
+
+
+
+# 参考
+
+- [在 CodeLab Adapter 中实现 Linda 并发模型](https://wwj718.github.io/post/%E7%BC%96%E7%A8%8B/adapter-linda/)
+- [Linda: 比 Actor 更好的并发模型](https://wwj718.github.io/post/%E7%BC%96%E7%A8%8B/linda-intro/)
+- [[译]Alan Kay 看待'对象'的几次观点转变](https://wwj718.github.io/post/%E7%BC%96%E7%A8%8B/alan-key-between-oo-fp/)
+- [建立在异步消息之上的同步指令: 分别在 JavaScript、Python、Squeak 上实现](https://wwj718.github.io/post/%E7%BC%96%E7%A8%8B/async-msg-sync-cmd/)
+- [[译]Smalltalk 背后的设计原则](https://wwj718.github.io/post/%E7%BC%96%E7%A8%8B/design-principles-behind-smalltalk/)
diff --git a/docs/user_guide/PRO_KEY.md b/docs/user_guide/PRO_KEY.md
new file mode 100644
index 0000000..7399a5a
--- /dev/null
+++ b/docs/user_guide/PRO_KEY.md
@@ -0,0 +1,9 @@
+# PRO_KEY
+PRO_KEY 是 CodeLab 尝试服务合作伙伴和企业用户的高级特性。
+
+使用 PRO_KEY 可以启用 Adapter 的高级特性: 激光雷达、overdrive...
+
+## 如何获取 PRO_KEY
+欢迎发送邮件咨询/合作/购买: `wuwenjie@codelab.club`
+
+# FAQ
diff --git a/docs/user_guide/develop.md b/docs/user_guide/develop.md
index 6a8c49b..77fae8c 100644
--- a/docs/user_guide/develop.md
+++ b/docs/user_guide/develop.md
@@ -1,6 +1,8 @@
# 测试版
+
\ No newline at end of file
diff --git a/docs/user_guide/gallery-bak.md b/docs/user_guide/gallery-bak.md
index 02ffff0..ffea337 100644
--- a/docs/user_guide/gallery-bak.md
+++ b/docs/user_guide/gallery-bak.md
@@ -54,7 +54,7 @@
## 在 CodeLab Scratch3 中,使用 micro:bit 开/关灯
-参考[积木化编程与智能家居](https://blog.just4fun.site/scratch3-smart-home.html)。
+参考[积木化编程与智能家居](https://wwj718.github.io/scratch3-smart-home.html)。
## 在 CodeLab Scratch3 中,利用运动检测开/关灯
@@ -62,7 +62,7 @@
### 在 CodeLab Scratch3 中,利用传感器做体感游戏
-参考[积木化编程与智能家居](https://blog.just4fun.site/scratch3-smart-home.html)。
+参考[积木化编程与智能家居](https://wwj718.github.io/scratch3-smart-home.html)。
## 在 CodeLab Scratch3 中,使用本地的机器视觉
@@ -73,25 +73,25 @@
我们布置好了一个可编程的空间,使用 Scratch3 中的积木进行空间编程,控制室内的灯光、插座、空调、电视,如果你愿意,也可以去淘宝买一根哈利波特的木制魔杖(估计只要九块九),用我们提供的机器视觉积木训练一下,就可以用你自制的咒语(比如用魔杖划一个o)控制你的房间
-参考[积木化编程与智能家居](https://blog.just4fun.site/scratch3-smart-home.html)。
+参考[积木化编程与智能家居](https://wwj718.github.io/scratch3-smart-home.html)。
## 门与电视的联动
我们使用树莓派可将任何屏幕变为变为一个可编程的广告牌(哈哈只要 200 块哦,这块似乎也值得商业化[奸笑])。加上简单的神经网络你可以做到,当穿着裙子的姑娘走近屏幕,屏幕立马给她安利新款纪梵希,而穿着格子衬衫的大叔靠近时,屏幕则以机械键盘蛊惑他。
-参考[积木化编程与智能家居](https://blog.just4fun.site/scratch3-smart-home.html)。
+参考[积木化编程与智能家居](https://wwj718.github.io/scratch3-smart-home.html)。
## 纸做的开关
-参考[积木化编程与智能家居](https://blog.just4fun.site/scratch3-smart-home.html)。
+参考[积木化编程与智能家居](https://wwj718.github.io/scratch3-smart-home.html)。
## Cozmo 接入在线课程平台
-参考[使用 Codelab_Adapter 连接 blockly 与硬件](https://blog.just4fun.site/scratch3_adapter-blockly.html)。
+参考[使用 Codelab_Adapter 连接 blockly 与硬件](https://wwj718.github.io/scratch3_adapter-blockly.html)。
## Incendio(火焰咒)
@@ -101,7 +101,7 @@
-参考[codelab-adapter 接入优必选 Alpha 系列机器人](https://blog.just4fun.site/scratch3-adapter-ubtrobot.html)
+参考[codelab-adapter 接入优必选 Alpha 系列机器人](https://wwj718.github.io/scratch3-adapter-ubtrobot.html)
## 接入 blender(连接游戏、电影与 VR)
@@ -345,11 +345,11 @@
-### [震动检测器](https://www.codelab.club/blog/vibration-detectors/)
+### [震动检测器](https://www-old.codelab.club/blog/vibration-detectors/)
-### [生日贺卡](https://www.codelab.club/blog/dynamictable-happybirthday/)
+### [生日贺卡](https://www-old.codelab.club/blog/dynamictable-happybirthday/)
diff --git a/docs/user_guide/install.md b/docs/user_guide/install.md
index 085c882..75a60e0 100644
--- a/docs/user_guide/install.md
+++ b/docs/user_guide/install.md
@@ -1,5 +1,6 @@
-# 安装(install)
+[安装(install)](/get_start/gs_install?version=latest)
+
## 兼容性
@@ -47,6 +46,8 @@ Linux 测试了
Raspbian 我们只测试了最新版本,如果有系统兼容性问题,欢迎[联系我们](/about/contact/)。
+-->
+
+
+## KEEP_LAST_CLIENT
+是否强行保留最后一个web client(webUI 或 Scratch)
+
+默认是 `False`
+
+## ALWAYS_KEEP_ADAPTER_RUNNING
+当所有web client退出时, Adapter 软件是否也退出
+
+默认是 `False`
+
## OPEN_MESSAGE_HUB
@@ -37,20 +56,7 @@ CodeLab Adapter 允许用户的自定义配置。配置文件位于:`~/codelab_a
## PYTHON3_PATH
-系统的 Python3 路径,当使用 [CodeLab Adapter Node](https://github.com/CodeLabClub/codelab_adapter_extensions/tree/master/nodes_v3) 时,实际上是调用了使用了系统的 Python3。
-
-PYTHON3_PATH 默认为:
-
-```python
- if (platform.system() == "Darwin"):
- path = "/usr/local/bin/python3"
- if platform.system() == "Windows":
- path = "python"
- if platform.system() == "Linux":
- path = "/usr/bin/python3"
-```
-
-你可以自行指定。
+系统的 Python3 路径, 只在 lite 版本(linux)中可用,默认为 `"/usr/bin/python3"`, 你可以自行指定。
## DEFAULT_ADAPTER_HOST
@@ -77,3 +83,35 @@ OPEN_REST_API 用于打开/关闭 [REST API](/dev_guide/REST-API/)。
取消注释`# TOKEN = "
+
## 启动 CodeLab Adapter 后,与 scratch3 无法通信怎么办?
-检查下是不是打开了科学上网的软件。
+检查下是不是打开了科学上网的软件, 不要使用全局模式。
## CodeLab Adapter 可以支持其他平台吗?
@@ -62,7 +62,7 @@ CodeLab Adapter 可以支持其他编程平台吗?而不只是在 CodeLab 的
CodeLab Adapter 几乎支持任何平台,无论是 Scratch 3.0 构建的还是 blockly 构建的(如 Tynker 和 code.org)的,或者你用其他什么黑魔法构建的,都没问题!
-这是目前的接入文档:[codelab-adapter 支持第三方平台](https://blog.just4fun.site/post/少儿编程/codelab-adapter-open-plan/)。
+这是目前的接入文档:[codelab-adapter 支持第三方平台](https://wwj718.github.io/post/少儿编程/codelab-adapter-open-plan/)。
相关的合作条款我们正在构建中。
@@ -70,24 +70,33 @@ CodeLab Adapter 几乎支持任何平台,无论是 Scratch 3.0 构建的还是
来信请注明公司/组织的一些基本信息,以及你们正在做的事情 :)
-## Python 版本(CodeLab Adapter 3.0.0)
+## Python 版本(CodeLab Adapter 4.9.5)
我们在不同操作系统打包时,使用的 Python 版本不同。
-- Windows:3.7.4
-- macOS:3.7.2
-- Raspbian:3.7.3
-- Ubuntu:3.7.5
+- Windows:3.7.6
+- macOS:3.8.7
+- Raspbian:3.7
+- Ubuntu:3.7
+
+详情可以查看WebUI菜单里的 `环境 > 查看`
## 如何使用 Python 拓展 Scratch 的能力?
-- [json message](/dev_guide/json-message/)。
-- 参考[使用 Python 拓展 Scratch 的能力](https://blog.just4fun.site/scratch-adapter-eim-script.html#_4)。
+- [Python对象的连接器:EIM 插件](/project_tutorial/eim_pt/)
+- [hello world(Adapter Extension)](/dev_guide/helloworld/)
+- [Adapter Node](/dev_guide/Adapter-Node/)
-## 如何找到 Adapter 主目录
+## 如何找到 Adapter 主目录(以Adapter 4.9.5为例)
Adapter 主目录,也是 Adapter 的日志目录,这儿存放了 Adapter 运行时使用的数据。
-Mac/Linux 用户的 Adapter 主目录在:`~/codelab_adapter`,如果找不到插件目录(如 Windows 用户),可以通过 CodeLab Adapter Web UI 工具栏里的`插件->打开插件目录`打开它。
+Windows 和 Mac,数据都在软件内部。
+
+* Windows: `codelab-adapter-4_9_5-win64/src/adapter_home`
+* Mac: `codelab-adapter-4_9_5-mac.app/Contents/Resources/adapter_home`
+* Linux: `~/codelab_adapter`
+
+如果找不到插件目录(如 Windows 用户),可以通过 CodeLab Adapter Web UI 工具栏里的`插件->打开插件目录`打开它。
## 如何找到插件目录
@@ -107,49 +116,29 @@ Windows 用户如果找不到用户配置文件目录,可以通过 CodeLab Ada
## 目前都支持哪些插件
-[extensions_v2](https://github.com/CodeLabClub/codelab_adapter_extensions/tree/master/extensions_v2)。
+[codelab_adapter_extensions](https://github.com/CodeLabClub/codelab_adapter_extensions)。
## 支持移动端吗(iPad/手机)
-支持。
-
-这是一个[例子](/video/codelab_ipad.mp4)。
-
-## 如何开机自启
-从 2.6.2 开始, 支持 headless 模式([点击下载 Raspbian 版本](/video/codelab-adapter-rpi-2_6_2.zip)),用于开机自启、无人值守的环境。
+Adapter 无法直接运行在移动端(可以运行在安卓的linux模拟器(如Termux)上)
-```
-chmod +x codelab-adapter
-./codelab-adapter --cli
-```
+在移动端上使用 Adapter 的方式是,将 Adapter 运行在计算机(如树莓派)上,之后通过url参数指向它: `https://scratch-beta.codelab.club/?adapter_host=192.168.31.140`
-推荐配置为:
+但由于不同平台对 https 的限制策略不同,可能需要一些处理技巧。
-```python
-# doc: https://adapter.codelab.club/user_guide/settings/
-OPEN_MESSAGE_HUB = True
-USE_SSL = False
-AUTO_OPEN_WEBUI = False
-PYTHON3_PATH = None
-DEFAULT_ADAPTER_HOST = "codelab-adapter.codelab.club"
-OPEN_WEBSOCKET_API = True
-OPEN_REST_API = False
-TOKEN = "ls3fb138c4124027"
-```
-
-之后打开 `http://raspberrypi.local:12358/?token=ls3fb138c4124027`
+这是一个[例子](/video/codelab_ipad.mp4)。
## 自定义存储目录
-2.6.3 开始支持这项功能。
使用环境变量`ADAPTER_HOME_PATH`来软件 home 目录,
例子:`ADAPTER_HOME_PATH=/tmp/my_adapter_home ./codelab-adapter --cli`
## 离线使用
-CodeLab Adapter 支持离线使用,目前有 2 种方式使用它。
+CodeLab Adapter 支持离线使用,目前有 3 种方式使用它。
- 1. 配合 [CodeLab Scratch Desktop(离线版)](https://www.codelab.club/blog/2020/08/20/tools/)使用。
- 2. 将 Web UI 里的`codelab-adapter.codelab.club`替换为`127.0.0.1`,形如 `https://codelab-adapter.codelab.club:12358/?token=YOUR_TOKEN`,重新刷新页面。
+1. (推荐) 修改host,添加一条`127.0.0.1 codelab-adapter.codelab.club` , [详情](#codelab-adapter_3)
+2. 配合 [CodeLab Scratch Desktop(离线版)](https://www.codelab.club/blog/2020/08/20/tools/)使用。
+3. 将 Web UI 里的`codelab-adapter.codelab.club`替换为`127.0.0.1`,形如 `https://codelab-adapter.codelab.club:12358/?token=YOUR_TOKEN`,重新刷新页面。
推荐使用`方法 1`。
@@ -157,7 +146,7 @@ CodeLab Adapter 支持离线使用,目前有 2 种方式使用它。
## 查看本地环境
-
+
你将看到:
@@ -175,20 +164,17 @@ CodeLab Adapter 支持离线使用,目前有 2 种方式使用它。
CodeLab Adapter 有很好的分布式支持:
-1. [Adapter Node](https://adapter.codelab.club/dev_guide/Adapter-Node/) 可以与 CodeLab Adapter 分布式协同
+1. [Adapter Node](/dev_guide/Adapter-Node/) 可以与 CodeLab Adapter 分布式协同
2. CodeLab Adapter 可以与 Scratch 分布式协同
为了解决 **树莓派里运行 Scratch 比较卡** 的问题,我们 可以让Adapter 运行在树莓派里,Scratch 则运行在本机上。
首先在树莓派中运行CodeLab Adapter,复制 WebUI 的URL, 形如: `https://codelab-adapter.codelab.club:12358/?token=765b3d2901ef47a0`
-
-
将 codelab-adapter.codelab.club 修改为 树莓派的 IP 地址: `https://192.168.21.104:12358/?token=765b3d2901ef47a0`。
现在你可以在 PC 里打开 树莓派里的 Adapter(需要安全校验) :
-
接着让我们在 CodeLab Scratch 里使用它, 打开: `https://scratch-beta.codelab.club/?adapter_host=192.168.21.104` (adapter_host 是 adapter 所在计算机的 IP,即树莓派的 IP, 它甚至可以运行在互联网的任何设备,任何位置!包括手机!)
@@ -204,11 +190,86 @@ CodeLab Adapter 有很好的分布式支持:
添加如下host规则:
-`codelab-adapter.codelab.club 127.0.0.1`
+`127.0.0.1 codelab-adapter.codelab.club`
以下是不同系统的hosts文件所在位置
* Windows: `C:\Windows\System32\drivers\etc\hosts`
* Android: `/system/etc/hosts`
* Mac/Linux: `/etc/hosts`
-* iPhone: `/etc/hosts`
\ No newline at end of file
+* iPhone: `/etc/hosts`
+
+## Windows 系统常见文件
+
+### 提示`缺少Python3`
+
+可能是你把 Adapter 当到了带有 **空格** 的文件夹里了。
+
+## 如何获取文件路径
+以下是windows 10 下的操作: `右键目标文件 -> 属性`
+
+
+
+## 为何有些网络下会无法Adapter发现/连接wifi设备
+这种情况,可能发生在wifi设备(悟空机器人、Romomaster EP)
+
+当你换一个网络就可用时, 那么问题可能是在某个网络启动Adapter,系统询问你是否允许其连接公共网络,你没有同意。
+
+可能的操作方法为: [Win10系统禁止/恢复某个程序连接网络的方法](https://jingyan.baidu.com/article/22a299b5e6fa909e18376a55.html)
+
+允许 adapter 内置的Python连网络(Python路径可在WebUI中看到)
+
+## 如何排查 无法发现设备 的问题?
+
+打开Adapter内置的 jupyterlab 插件,打开 `notebooks目录 > devices-connect-test.ipynb`,测试对应设备的连接,如果此处显示 **发现** 设备,但Adapter插件无法与设备连接,说明是Adapter插件问题,请[给我们反馈bug, 最好配上截图或视频](https://discuss.codelab.club/); 如果此处显示 **未发现** 设备,则与Adapter无关,请检查你的网络、USB连接、以及设备是否正常。
+
+## MacOS 应用程序没有响应
+如果你遇到以下情况
+
+
+
+可以通过以下方式重新打开Adapter: `右键 -> 显示包内容 -> Contents -> MacOS -> CodeLab-Adapter`
+
+
+
+点击运行目录里的 CodeLab-Adapter
+
+
+
+如果因此导致无法关机, `control + command + 电源键` 或者 `长按电源键`
+
+## webUI 无法退出Adapter (token错误)
+### MacOS
+
+
+### Windows
+图标在页面右下角, 右键退出。
+
+### Linux & RPI
+`pkill -f codelab-adapter`
+
+## 之前安装过旧版本的Adapter,使用新的版本出现问题
+
+下载最新的 Adapter
+
+
+
+
+
+## MacOS 11 无法扫描蓝牙设备
+现象: 使用蓝牙设备(诸如overdrive) ,系统会提示蓝牙未开启。
+
+原因: MacOs 权限管理更为严格,需要授权。
+
+解决方案: 从软件包里打开 Adapter,然后授权。
+
+可以通过以下方式重新打开Adapter: `右键 -> 显示包内容 -> Contents -> MacOS -> CodeLab-Adapter`
+
+
+
+点击运行目录里的 CodeLab-Adapter
+
+
+
+## windows 32bit 版本
+[winFull.zip(4_9_3)](https://scratch3-files.just4fun.site/codelab-adapter-4_9_3-win-fix.zip)
\ No newline at end of file
diff --git a/docs/user_guide/Linda.md b/docs/user_guide/Linda.md
new file mode 100644
index 0000000..5344707
--- /dev/null
+++ b/docs/user_guide/Linda.md
@@ -0,0 +1,379 @@
+# Linda
+
+
+
+用于协调不同的程序,使它们进行协作。
+
+!!! 提醒
+ 在 **Adapter >= 4.0** 中可用。
+
+
+
+# 介绍
+
+CodeLab Adapter 4.0 内置了 Linda server(Tuple Space),目前我们提供了以下客户端(持续增加中...)与 Linda Tuple Space 交互:
+
+- [Python Client](#python-client)
+- [Scratch Client](#scratch-client)
+- [REST API](#rest-api)
+- [cli (命令行客户端)](#cli)
+- [JavaScript Client(开发者)](#javascript-client)
+- [mush-lang](#mush-lang)
+
+Linda 最有趣的一个地方是,所有 Tuple Space 参与者(跨语言、跨系统、跨网络)都能够互操作,语义由参与者自己"协调", 所以 Alan Kay 将 Linda 称为"协调语言"。
+
+# 基本操作(operate)
+
+### 核心操作
+* out: 生成一个元组(tuple) 到 元组空间(tuple space)
+* in: 在tuple space中匹配元组,如果匹配到则消耗它, 如果未匹配则一直等待
+ * inp: in的非阻塞版本。 如果匹配到则消耗它, 如果未匹配则返回空元组
+* rd: read only, 在tuple space中匹配元组,如果匹配到则返回它(不移除), 如果未匹配则一直等待
+ * rdp: 非阻塞版本的 rd
+* eval: 暂不考虑实现
+
+### 辅助操作
+不在 linda 的原始论文中,是我自己的扩展
+
+* dump: 获取元组空间所有元组
+* status: 获取元组空间状态
+* reboot: 重置元组空间
+ * reboot 将重置元组空间,确保执行这个操作时,没有任何其他 linda client ,否则,此前的 linda 操作将一直处于等待中。
+
+
+# Python Client
+!!!提醒
+ 已经内置在完整版(Windows/macOS)里, 打开 Jupyterlab 即可使用。
+
+安装依赖: `pip install codelab_adapter_client`
+
+
+提供同步和异步两种基类:
+
+- AdapterNode
+- AdapterNodeAio
+
+## AdapterNode
+
+```python
+import time
+from codelab_adapter_client import AdapterNode
+
+class MyNode(AdapterNode):
+ NODE_ID = "linda/test"
+
+ def __init__(self):
+ super().__init__()
+
+node = MyNode()
+node.receive_loop_as_thread()
+time.sleep(0.1) # 等待zmq通信管道建立完成
+```
+
+创建Adapter Node之后,就可以通过node使用linda了。
+
+```python
+res = node.linda_reboot() # reboot linda server, clean tuple space
+assert res == []
+
+res = node.linda_out([1, 2, 3]) # out
+assert res == [1, 2, 3]
+
+res = node.linda_out([1, 2, 4]) # out
+res = node.linda_dump()
+assert res == [[1, 2, 3], [1, 2, 4]]
+
+res = node.linda_rd([1, 2, 3]) # read and blocking
+assert res == [1, 2, 3]
+
+res = node.linda_rdp([1, 2, "*"]) # read but non-blocking
+assert res == [1, 2, 3] # 先入先出
+
+res = node.linda_in([1,2,3]) # read then remove (blocking)
+assert res == [1, 2, 3]
+```
+
+## AdapterNodeAio(异步)
+
+同步和异步 API 保持一致
+
+```python
+import asyncio
+from codelab_adapter_client import AdapterNodeAio
+
+class MyNode(AdapterNodeAio):
+ NODE_ID = "linda/test"
+
+ def __init__(self):
+ super().__init__()
+
+# 以下代码在 jupyter 中运行,如果你想在python脚本中使用,请考虑异步代码的生命周期,参考: https://github.com/CodeLabClub/codelab_adapter_client_python/blob/master/tests/test_linda_client.py#L26
+node = MyNode()
+task = asyncio.create_task(node.receive_loop())
+await asyncio.sleep(0.1) # !! 等待zmq通信管道建立完成
+
+_tuple = ["test_linda"]
+
+# reboot
+res = await node.linda_reboot()
+assert res == []
+
+# out
+_tuple = ["hello", "world"]
+await node.linda_out(_tuple)
+
+# rdp
+res = await node.linda_rdp(_tuple)
+assert res == _tuple
+
+# inp
+res = await node.linda_inp(_tuple)
+assert res == _tuple
+
+res = await node.linda_dump()
+assert res == []
+```
+
+更多用法参考测试文件: [test_linda_client.py](https://github.com/CodeLabClub/codelab_adapter_client_python/blob/master/tests/test_linda_client.py)
+
+# Scratch Client
+
+
+
+
+
+# REST API
+
+使用 [httpie](https://httpie.io/docs#non-string-json-fields) 作为客户端。`:=` 表示后边跟的是 json 数据
+
+## out
+
+`http post https://codelab-adapter.codelab.club:12358/api/linda operate=out tuple:='["hello", "linda"]'`
+
+## in
+
+`http post https://codelab-adapter.codelab.club:12358/api/linda operate=in tuple:='["hello", "linda"]'`
+
+## dump
+
+`http post https://codelab-adapter.codelab.club:12358/api/linda operate=dump`
+
+其他原语类似
+
+## cli (命令行客户端)
+
+```bash
+pip install https://github.com/CodeLabClub/codelab_adapter_client_python/archive/master.zip
+# pip install codelab_adapter_client --upgrade # 暂未更新到 pypi
+codelab-linda --help
+
+codelab-linda out --help
+
+# reboot
+codelab-linda reboot
+
+# dump
+codelab-linda dump
+
+# out
+codelab-linda out --data '[1, "hello"]'
+
+# rd
+codelab-linda rd --data '[1, "hello"]'
+codelab-linda rd --data '[1, "*"]'
+
+# rdp
+codelab-linda rd --data '[1, 2, 3]' # []
+
+# in
+codelab-linda rd --data '[1, "*"]'
+```
+
+# JavaScript Client
+方便开发者,将 Linda 引入自己的web项目。
+
+CodeLab 目前使用 JavaScript Client,将 Linda 带入 CodeLab Scratch、CodeLab Adapter WebUI 和 Lively。
+
+```js
+import AdapterBaseClient from "./codelab_adapter_base.js"; // https://github.com/CodeLabClub/scratch3_eim/blob/v3/codelab_adapter_base.js
+let NODE_ID = "linda/js/client";
+let HELP_URL = "https://adapter.codelab.club/user_guide/Linda/";
+let runtime = null;
+let adapter_client = new AdapterBaseClient(NODE_ID, HELP_URL, runtime);
+
+await adapter_client.linda_out([1,2,3]).then((data)=>{console.log("linda",data); return data})
+
+tuple = await adapter_client.linda_in(["hi", "lively", "*"]).then((data)=>{console.log("linda",data); return data})
+
+tuple = await adapter_client.linda_in(["hi", "python", "from Lively"]).then((data)=>{console.log("linda",data); return data})
+
+tuple = await adapter_client.linda_in(["hello", "lively", "*"]).then((data)=>{console.log("linda",data); return data})
+
+await adapter_client.linda_in([1,2,5], 1000).then((data)=>{console.log("linda",data); return data}) //超时
+```
+
+
+
+# mush-lang
+> LISP 是一种构建材料 -- Alan Kay
+
+为了更好地探索 Linda 的可能性,我们围绕 Linda 的基本原语,构建了一门简单的语言 -- [**mush-lang**](https://github.com/wwj718/mush-lang)。
+
+mush-lang 采用 LISP 风格的语法,可以视为 LISP 的一门玩具方言。 LISP 因其同构性(内外表示一致),可能是所有语言中最简单的。
+
+mush-lang 目前在 Python 中实现。
+
+
+
+# Demo
+
+
+## 多个 Scratch 角色 的 实时同步
+
+
+
+在 Python 的例子中,我们甚至在Scratch里构建了 Server!
+
+
+两个Scratch角色同步的代码如下
+
+* [linda-demo1](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/linda-demo1.sb3)
+* [linda-demo2](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/linda-demo2.sb3)
+
+
+python 与 Scratch 同步的代码如下:
+
+* [linda-demo1](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/linda-demo1.sb3)
+
+Python核心部分代码为:
+
+```python
+node.linda_out(["request", "loudness", "xxx"])
+node.linda_in(["response", "loudness", "*"])
+```
+
+
+## Jupyter 与 Scratch 的互操作
+
+
+跨语言对象之间的互操作
+
+用到了 jupyterlab 3.0 里的 ipywidgets.
+
+```python
+# 在jupyterlab 3.0中可用
+from ipywidgets import interact, interactive, fixed, interact_manual
+from codelab_adapter_client import AdapterNode
+import time
+
+class MyNode(AdapterNode):
+ NODE_ID = "linda/jupyter"
+
+ def __init__(self):
+ super().__init__()
+
+node = MyNode()
+node.receive_loop_as_thread()
+
+@interact(show=True, x=100, size=100)
+def f(show,x,size):
+ node.linda_out(["%%x", x], wait=False) # f函数是非阻塞的回调函数,使用wait=False参数,使node.linda_out使非阻塞的,此时相当于流,记得使用 message tuple(见下文)
+ node.linda_out(["%%show", show], wait=False)
+ node.linda_out(["%%size", size], wait=False)
+ return show,x,size
+```
+
+
+# 进阶
+## 消息风格
+linda 的基本观点是数据不停生灭(由用户显式操控)。
+
+如果我们想在 Linda 中实现 "消息/流" 的模式,可能会遇到tuple堆积(生产者太快)的问题(这是很严重的问题,似乎也不是正确使用linda的方式)
+
+为了尽可能少地破坏概念完整性,我们引入了一种特殊的tuple来支持"消息/流"模式。
+
+我们定义了一种叫做 message tuple 的 tuple,它像消息一样,每次只能流的瞬时截面: **一个数据**。
+
+以下是几个message tuple的例子:
+
+* ("%%x", 1)
+* ("%%y", 50)
+* ("%%z", "hello", "world")
+
+在语法层面,message tuple只是普通的tuple,唯一区别是第一个元素需要是如下风格字符串, "%%x", x可以是任意值,可以把它看作message tuple的id,不同id的message tuple被视为不同tuple,支持tuple的所有操作符。
+
+以下是一个例子:
+
+
+* [message_tuple demo](https://scratch-beta.codelab.club/?sb3url=https://adapter.codelab.club/sb3/linda-message_tuple.sb3)
+
+
+!!!视角
+ 站在变量的视角,你可以将其看作全局变量
+
+
+# FAQ
+
+## 如何看到 Linda Tuple Space
+`Adapter >=4.1.0`
+
+
+
+
+
+## 在 Scratch 里有些 **in/rd** 积木一直阻塞
+简单而言,按照以下顺序运行程序:
+
+* 确保在linda in/rd 积木运行之前,先运行linda reboot
+* 之后在启动Scratch程序
+
+以下是原因分析(可以不看):
+
+这个Linda背后的实现有关,Adapter Linda 目前是C/S架构。Scratch中的 in/rd 积木实际上 promise。
+
+reboot针对的是linda server的操作。
+
+如果程序在 in/rd 的时候,被reboot,则客户端(Scratch)的 in/rd 对应的promise永远不会被解决。
+
+
+**linda reboot** 一下
+
+## 速度
+
+
+
+默认情况下,30帧/s。
+
+在Python客户端,通过修改参数,可以提高到300-600帧/s。
+
+```python
+class MyNode(AdapterNode):
+ NODE_ID = "linda/test"
+
+ def __init__(self):
+ super().__init__(recv_mode="block", bucket_fill_rate=1000, bucket_token=1000)
+```
+
+
+## Linda 与 EIM
+Linda 与 EIM 将长期共存,一个 Adapter Node,即是Linda client,也是EIM client,它们各有所擅。长期来看,我们更偏好 Linda。
+
+
+
+---
+
+
+
+# 参考
+
+- [在 CodeLab Adapter 中实现 Linda 并发模型](https://wwj718.github.io/post/%E7%BC%96%E7%A8%8B/adapter-linda/)
+- [Linda: 比 Actor 更好的并发模型](https://wwj718.github.io/post/%E7%BC%96%E7%A8%8B/linda-intro/)
+- [[译]Alan Kay 看待'对象'的几次观点转变](https://wwj718.github.io/post/%E7%BC%96%E7%A8%8B/alan-key-between-oo-fp/)
+- [建立在异步消息之上的同步指令: 分别在 JavaScript、Python、Squeak 上实现](https://wwj718.github.io/post/%E7%BC%96%E7%A8%8B/async-msg-sync-cmd/)
+- [[译]Smalltalk 背后的设计原则](https://wwj718.github.io/post/%E7%BC%96%E7%A8%8B/design-principles-behind-smalltalk/)
diff --git a/docs/user_guide/PRO_KEY.md b/docs/user_guide/PRO_KEY.md
new file mode 100644
index 0000000..7399a5a
--- /dev/null
+++ b/docs/user_guide/PRO_KEY.md
@@ -0,0 +1,9 @@
+# PRO_KEY
+PRO_KEY 是 CodeLab 尝试服务合作伙伴和企业用户的高级特性。
+
+使用 PRO_KEY 可以启用 Adapter 的高级特性: 激光雷达、overdrive...
+
+## 如何获取 PRO_KEY
+欢迎发送邮件咨询/合作/购买: `wuwenjie@codelab.club`
+
+# FAQ
diff --git a/docs/user_guide/develop.md b/docs/user_guide/develop.md
index 6a8c49b..77fae8c 100644
--- a/docs/user_guide/develop.md
+++ b/docs/user_guide/develop.md
@@ -1,6 +1,8 @@
# 测试版
+
\ No newline at end of file
diff --git a/docs/user_guide/gallery-bak.md b/docs/user_guide/gallery-bak.md
index 02ffff0..ffea337 100644
--- a/docs/user_guide/gallery-bak.md
+++ b/docs/user_guide/gallery-bak.md
@@ -54,7 +54,7 @@
## 在 CodeLab Scratch3 中,使用 micro:bit 开/关灯
-参考[积木化编程与智能家居](https://blog.just4fun.site/scratch3-smart-home.html)。
+参考[积木化编程与智能家居](https://wwj718.github.io/scratch3-smart-home.html)。
## 在 CodeLab Scratch3 中,利用运动检测开/关灯
@@ -62,7 +62,7 @@
### 在 CodeLab Scratch3 中,利用传感器做体感游戏
-参考[积木化编程与智能家居](https://blog.just4fun.site/scratch3-smart-home.html)。
+参考[积木化编程与智能家居](https://wwj718.github.io/scratch3-smart-home.html)。
## 在 CodeLab Scratch3 中,使用本地的机器视觉
@@ -73,25 +73,25 @@
我们布置好了一个可编程的空间,使用 Scratch3 中的积木进行空间编程,控制室内的灯光、插座、空调、电视,如果你愿意,也可以去淘宝买一根哈利波特的木制魔杖(估计只要九块九),用我们提供的机器视觉积木训练一下,就可以用你自制的咒语(比如用魔杖划一个o)控制你的房间
-参考[积木化编程与智能家居](https://blog.just4fun.site/scratch3-smart-home.html)。
+参考[积木化编程与智能家居](https://wwj718.github.io/scratch3-smart-home.html)。
## 门与电视的联动
我们使用树莓派可将任何屏幕变为变为一个可编程的广告牌(哈哈只要 200 块哦,这块似乎也值得商业化[奸笑])。加上简单的神经网络你可以做到,当穿着裙子的姑娘走近屏幕,屏幕立马给她安利新款纪梵希,而穿着格子衬衫的大叔靠近时,屏幕则以机械键盘蛊惑他。
-参考[积木化编程与智能家居](https://blog.just4fun.site/scratch3-smart-home.html)。
+参考[积木化编程与智能家居](https://wwj718.github.io/scratch3-smart-home.html)。
## 纸做的开关
-参考[积木化编程与智能家居](https://blog.just4fun.site/scratch3-smart-home.html)。
+参考[积木化编程与智能家居](https://wwj718.github.io/scratch3-smart-home.html)。
## Cozmo 接入在线课程平台
-参考[使用 Codelab_Adapter 连接 blockly 与硬件](https://blog.just4fun.site/scratch3_adapter-blockly.html)。
+参考[使用 Codelab_Adapter 连接 blockly 与硬件](https://wwj718.github.io/scratch3_adapter-blockly.html)。
## Incendio(火焰咒)
@@ -101,7 +101,7 @@
-参考[codelab-adapter 接入优必选 Alpha 系列机器人](https://blog.just4fun.site/scratch3-adapter-ubtrobot.html)
+参考[codelab-adapter 接入优必选 Alpha 系列机器人](https://wwj718.github.io/scratch3-adapter-ubtrobot.html)
## 接入 blender(连接游戏、电影与 VR)
@@ -345,11 +345,11 @@
-### [震动检测器](https://www.codelab.club/blog/vibration-detectors/)
+### [震动检测器](https://www-old.codelab.club/blog/vibration-detectors/)
-### [生日贺卡](https://www.codelab.club/blog/dynamictable-happybirthday/)
+### [生日贺卡](https://www-old.codelab.club/blog/dynamictable-happybirthday/)
diff --git a/docs/user_guide/install.md b/docs/user_guide/install.md
index 085c882..75a60e0 100644
--- a/docs/user_guide/install.md
+++ b/docs/user_guide/install.md
@@ -1,5 +1,6 @@
-# 安装(install)
+[安装(install)](/get_start/gs_install?version=latest)
+
## 兼容性
@@ -47,6 +46,8 @@ Linux 测试了
Raspbian 我们只测试了最新版本,如果有系统兼容性问题,欢迎[联系我们](/about/contact/)。
+-->
+
+
+## KEEP_LAST_CLIENT
+是否强行保留最后一个web client(webUI 或 Scratch)
+
+默认是 `False`
+
+## ALWAYS_KEEP_ADAPTER_RUNNING
+当所有web client退出时, Adapter 软件是否也退出
+
+默认是 `False`
+
## OPEN_MESSAGE_HUB
@@ -37,20 +56,7 @@ CodeLab Adapter 允许用户的自定义配置。配置文件位于:`~/codelab_a
## PYTHON3_PATH
-系统的 Python3 路径,当使用 [CodeLab Adapter Node](https://github.com/CodeLabClub/codelab_adapter_extensions/tree/master/nodes_v3) 时,实际上是调用了使用了系统的 Python3。
-
-PYTHON3_PATH 默认为:
-
-```python
- if (platform.system() == "Darwin"):
- path = "/usr/local/bin/python3"
- if platform.system() == "Windows":
- path = "python"
- if platform.system() == "Linux":
- path = "/usr/bin/python3"
-```
-
-你可以自行指定。
+系统的 Python3 路径, 只在 lite 版本(linux)中可用,默认为 `"/usr/bin/python3"`, 你可以自行指定。
## DEFAULT_ADAPTER_HOST
@@ -77,3 +83,35 @@ OPEN_REST_API 用于打开/关闭 [REST API](/dev_guide/REST-API/)。
取消注释`# TOKEN = "